
연이은 인명사고로 자율주행차가 난관에 봉착했다. 다양한 기업의 수많은 실주행 테스트에서 큰 사고를 일으키지 않았던 자율주행차. 하지만 2018년 3월 중순, 마치 귀신에 홀린 듯 1주일간 연이은 사망사고를 일으키면서 안전에 대한 논란을 불러 일으키고 있다. 그렇지만 실수가 존재하는 사람의 운행보다 결국은 자율주행차가 더 안전성을 지닐 것이라는 반론도 만만치는 않다. 어찌보면 이 쪽이 더 다수 의견으로, 350만 마일(약 563만km)을 운행하는 동안 작은 접촉사고 외에는 어떤 사고도 일으키지 않은 구글 웨이모Waymo의 사례는 자율주행차의 안전성을 방증한다. 웨이모의 안전 리포트Waymo Safety Report : On the Road to Fully Self-Driving를 통하여 안전한 자율주행차를 만들기 위한 기본 조건을 알아본다.
웨이모의 현재 세대 자율운행차량은 2017 크라이슬러 퍼시피카 하이브리드 미니밴2017 Chrysler Pacifica Hybrid Miniivan의 수정 버전으로, 웨이모의 시스템을 통합하고 있다. 피아트크라이슬러FCA가 제공한 퍼시피카 하이브리드 미니밴의 수정버전은 자동차의 안전 성능 사항을 규정한 연방자동차안전표준FMVSS : Federal Motor Vehicle Safety Standards를 준수하는 차량이다.
FCA와 웨이모의 기술 협력으로 웨이모의 자율주행 시스템이 통합된 이 차량은 수천 가지의 추가적인 하드웨어 테스트가 수행됐다. 이 테스트는 브레이크와 스티어링은 물론 헤드라이트, 도어락 등에 이르는 모든 하드웨어를 테스트하여 차량이 수동 모드, 테스트 드라이버가 있는 자율주행모드, 운전자가 없는 완전 자동 모드까지 모든 주행 형태에서 안전하게 작동하는지를 확인하는 작업으로, 시뮬레이션과 테스트 트랙을 통해 진행된다.
하드웨어와 마찬가지로 자율운행 소프트웨어 역시 철저한 테스트가 이뤄진다. 안전 설계Safety by Design라는 기본 개념을 바탕으로 인지, 행동 예측, 주행 계획 등 소프트웨어의 각 구성 요소를 테스트하는 것이다. 또한 소프트웨어는 지속적으로 개선되는데, 이때 소프트웨어의 각 변경 사항은 엄격한 릴리스 프로세스를 거쳐 이뤄진다. 소프트웨어 테스트 역시 시뮬레이션 테스트와 테스트 트랙 주행, 그리고 실제 도로 주행을 통해 안전성을 검증한다.
이 과정을 간략히 살피면 다음과 같다.
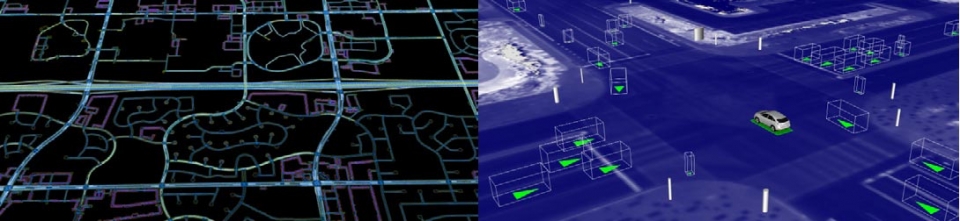
■ 시뮬레이션 테스트 : 시뮬레이션 테스트는 차량이 도로에서 마주칠 수 있는 다양한 상황을 설정하여 가상 환경에서 주행하는 것이다. 가상 현실을 통하여 자율주행차량이 실질적인 고급 운전 기술을 익히는 과정으로, 가장 까다로운 상황을 포함한 다양한 형태의 시뮬레이션이 진행된다.
웨이모의 경우, 시뮬레이션을 통하여 매일 약 2만 5000대의 자율운행차량이 800만 마일을 주행하여 안전을 위한 새로운 기동을 실험하고 있다. 예를 들면, 애리조나 주 메사의 사우스롱모어스트리트South Longmore Street와 웨스트서던애비뉴West Southern Avenue의 모퉁이에서 좌회전을 도중 동안 노란색 화살표가 깜박이는 상황을 가상 환경에 구현하여 자율주행 시스템의 판단을 살피고, 대응 방법을 익히게 하는 것. 이 상황 시뮬레이션을 수천 번 반복하면 자율주행주행 차량은 주변 차량을 살피면서 안전하고, 다른 교통에 방해를 주지 않으면서 교차로를 벗어나는 방법을 알게 된다.
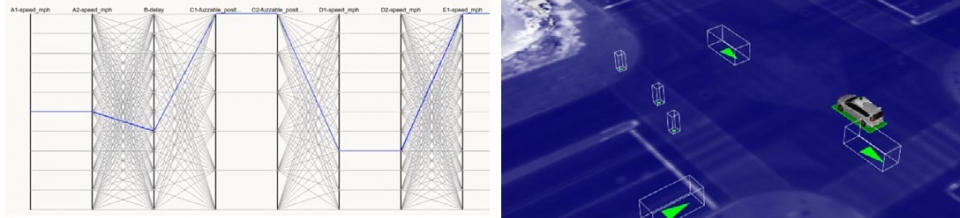
다음 단계로 웨이모는 수천 개의 변수 시나리를 적용하여 이러한 까다로운 좌회전을 확장하여 시뮬레이션 테스트를 전개한다. 퍼징fuzzing 기법으로 다가오는 차량의 속도와 신호등, 보행자 이동 타이밍을 변경하거나 없었던 차량, 보행자와 자전거를 추가하여 다양한 상황에서 자율주행 시스템이 안전 주행을 익힐 수 있도록 하는 것이다.
깜박이는 황색 신호에서의 안전 주행 방법을 완전히 익혔다면, 이 지식은 이제 웨이모의 모든 차량과 공유되고, 폐쇄 코스 테스트, 실제 도로 주행을 사용하여 시뮬레이션된 경험이 검증된다. 그리고 나서 다른 환경에서의 시뮬레이션 테스트 사이클이 다시 시작된다.
■ 폐쇄 트랙 테스트 : 폐쇄 코스 주행 테스트는 새로운 소프트웨어를 몇 대의 테스트 차량에 먼저 적용하여 테스트 트랙에서 주행하는 과정이다. 웨이모는 캘리포니아에 91에이커(약 36만8000㎡) 규모의 테스트 트랙을 구현했다. 이 곳은 단순한 트랙이 아니라 고속도로 진입로, 철도 건널목 등 실제 도로와 유사하게 구현된 일종의 모의 도시이다. 여기에서 수천 개의 구조화된 테스트가 진행되어 실제 상황에서 자율주행차량의 움직임을 검증하는 것이다.
웨이모에 따르면, 2만개가 넘는 시뮬레이션 시나리오가 개발되어 캐슬<<Castle>>이라 불리우는 이 가상 도시에서는 비보호 좌회전 상황, 혹은 빠른 속도로 크게 회전하는 공격적인 운전자, 주차 차량 사이로 무단횡단을 시도하는 사람이 갑자기 나타는 상황에서 자율주행차량의 실제 대응력을 살피게 된다. 또 대형 트럭으로 차량의 시야를 가리거나, 짧은 초록 신호등을 제공하는 등 일반적인 도로 기동의 여러 가지 변형 상황에서의 주행 역량도 검증된다. 이러한 구조화된 테스트는 자율주행차량이 실제 공공도로에서 주행 테스트로 나아갈 수 있도록 하는 안전 보장의 핵심 전제 조건이다.

■ 도로 주행 테스트 : 시뮬레이션과 폐쇄 도로 테스트를 통하여 차량과 소프트웨어가 의도한 대로 작동하고 있음이 확인되면 공공 도로에서 운행되는 차량에 도입된다. 여기서는 혁신적이고 모험적인 시도보다 안전에 우선을 둔 보수성이 더 큰 덕목이다.
예를 들어 웨이모의 자율운행차량은 먼저 미리 정해진 경로를 주행하여 안전성과 일관성을 입증한 후 점차적으로 주행 경로를 다변화하고, 지역을 확장한다. 웨이모는 지난 8년간 지속적인 실제 도로 주행을 진행하여 포괄적인 도로 주행 테스트 프로그램을 만들었으며, 주행 거리를 늘려나가면서 지속적인 개선으로 완성도를 더욱 높여가고 있다.
실주행 테스트는 차량에 의한 완전 자율주행이 아닌 고도로 숙련된 운전자가 탑승하여 진행된다. 테스트 드라이버는 자율주행 시스템 전반을 이해하고, 방어 운전 코스를 포함하여 공공 도로에서 차량을 안전하게 모니터하는 방법을 익힌 사람으로 실 주행 동안 차량에 탑승하여 시스템을 모니터링하고 필요한 경우 차량을 제어한다.
도로 주행 테스트는 소프트웨어를 평가하는 데 사용되는 수만 주간의 주행 거리를 자율주행차량이 움직이며 시스템을 모니터링하고, 시스템의 성능과 안전성을 입증하는 것이 목표이다. 이와 동시에 실제 테스트는 시스템을 지속적으로 개선 할 수있는 지속적인 피드백을 제공하기도 한다. 실제 도로 테스트에서 나타난 다양한 상황을 기반으로 웨이모의 엔지니어는 소프트웨어를 조정, 더 원활하고 안전하게 운전할 수 있도록 개선하면서 자율주행차량의 역량을 안전하게 확장시킨다.
예를 들어 피닉스에서의 테스트는 극한의 온도와 공기 중의 먼지 등 사막 조건에서 센서와 소프트웨어를 테스트할 수 있게 했으며, 오스틴에서는 수평 교통신호등의 인식을 검증할 수 있게 했다. 또 커크랜드는 더 습한 환경에서의 정상적인 동작을 테스트할 수 있게 했다.
