연이은 인명사고로 자율주행차가 난관에 봉착했다. 다양한 기업의 수많은 실주행 테스트에서 큰 사고를 일으키지 않았던 자율주행차. 하지만 2018년 3월 중순, 마치 귀신에 홀린 듯 1주일간에 걸쳐 연이은 사망사고를 일으키면서 안전에 대한 논란을 불러 일으키고 있다. 하지만, 연이은 자율주행 자동차의 사고에도 불구, 실수가 존재하는 사람의 운행보다 자율주행차가 결국은 더 안전성을 지닐 것이라는 반론은 만만치 않다. 어찌보면 이 쪽이 더 다수 의견으로, 350만 마일(약 563만km)을 운행하는 동안 작은 접촉사고 외에는 어떤 사고도 일으키지 않은 구글 웨이모Waymo의 사례는 자율주행차의 안전성을 방증한다. 웨이모가 발표한 안전 리포트Waymo Safety Report : On the Road to Fully Self-Driving를 통하여 안전한 자율주행차를 만들기 위한 기본 조건을 알아본다. <편집자>

한해에 120만명 이상이 목숨을 잃는 비극의 시작은 인간적 실수에서 출발한다. 운전 중 핸드폰 조작, 호기나 치기(혹은 습관적으로)로 이뤄지는 음주운전 등으로 인해 도로는 결코 안전하지 않다. 기술 발전에 힘입어 각종 안전장치가 계속 추가되고 있지만, 도로 위의 참사가 줄어들지 않고, 오히려 늘고 있는 이유이다.

웨이모처럼 자율주행차량을 개발하고 있는 기업과 그 종사자들은 자율주행차량이 이 비극을 막고, 매년 수 천만명의 목숨을 구할 것으로 믿고 있다. 하지만 자율주행차는 안전성이 완전히 인정될 때 사람들에게 받아들여질 수 있다. 그래서 웨이모는 수억 마일의 시뮬레이션과 350만 마일 이상의 실주행 테스트를 통하여 자율주행 차량이 더 안전하고, 더 향상된 이동을 제공할 수 있음을 증명한다.
자율주행 차량이 세상을 보는 방법
사람이 운전할 때나 기계가 운전할 때나 기본적인 방식은 동일하다. ▲내가 지금 어디에 있고(주변 환경 인지) ▲주변에 무엇이 있음(정보 처리)을 파악한 후 ▲다음에 일어날 일을 예측(행동 예측)하여 ▲해야 할 작업을 실행(운전 결정)한다는 것이다. 그런데 자율주행차에 있어 이러한 기초적 질문에 대한 대답은 특히 중요하다.
#1 지금 어디에 있는가?
자동차가 어느 위치에서든 운전할 수 있게 하기 위해 웨이모는 도로 프로필, 커브 및 보도, 차선 표시, 횡단 보도, 신호등, 정지 신호 및 기타 도로 기능을 강조한 자체적인 3차원 지도를 만들었다. GPS에 전적으로 의존하기 보다 사전에 제작된 맞춤 지도를 바탕으로 도로상의 위치를 정확하게 결정할 수 있게 한 것이다.
#2주변에 무엇이 있는가?
차량의 센서와 소프트웨어는 교통 신호등과 철도 건널목에서 일시 정지 신호는 물론 다른 차량과 보행자, 자전거를 타는 사람, 도로 공사와 같은 도로 상의 장애물을 지속적으로 파악하고, 검사한다.
웨이모의 경우, 모든 방향에서 최대 300미터를 볼 수 있게 자율주행차량을 설계했다.
#3어떤 일이 일어날 것인가?
자율주행 소프트웨어는 현재의 속도와 궤도를 기반으로 도로상의 모든 동적인 객체의 움직임을 예측한다. 예를 들면 자전거를 타는 사람을 일반 보행자와 다르게 움직인다는 것을 이해하고 적용함으로써 다양한 경로를 예측하게 된다.
또 변화하는 도로 상태(예 공사로 인한 차선 폐쇄)가 주변의 다른 사람들의 행동에 어떤 영향을 미치는지를 고려하기도 한다.
#4무엇을 해야 하는가?
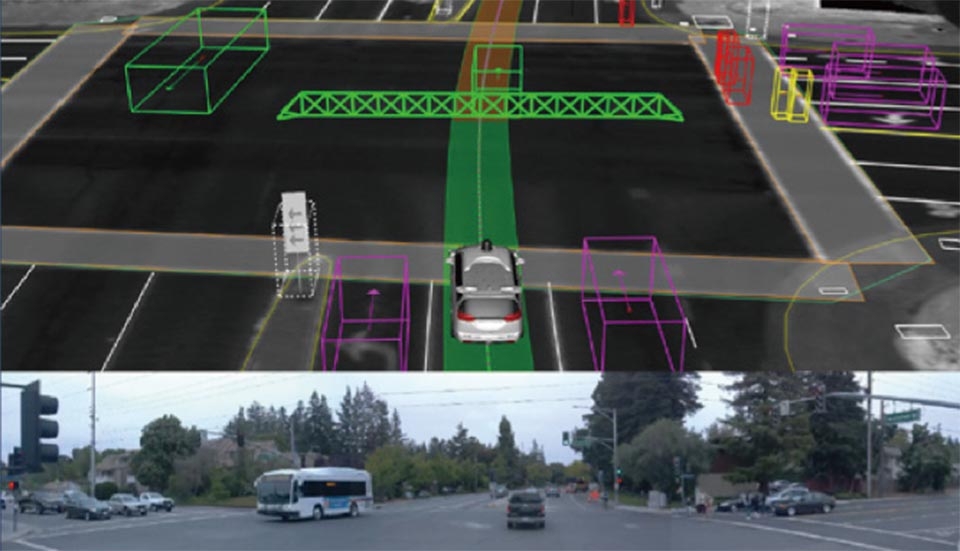
소프트웨어는 차량이 선택할 수 있는 적절한 경로를 발견할 때 벌어질 수 있는 모든 요소를 고려하게 된다. 경로를 따라 안전하게 진행하는 데 필요한 정확한 속도와 최적의 차선을 선택하여 실제로 안전하게 차량이 운행될 수 있도록 조향 장치를 제어하는 것이다. 경로를 선택한 후에도 차량 주위의 모든 환경(360도)을 끊임없이 모니터링하고, 다른 도로 사용자의 향후 행동까지 예측하여 모든 돌발 상황에 신속하고 안전하게 대응할 수 있게 한다.
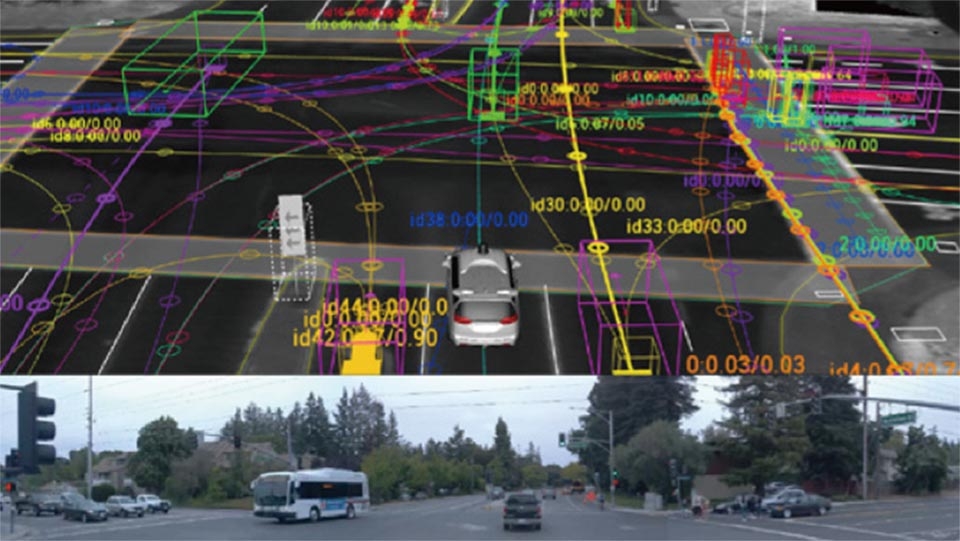
이를 통하여 기계가 운전하는 기초 그림이 완성된다. 예를 들어 상단 그림의 녹색 경로는 차량이 앞으로 나아갈 수 있는 최적의 경로를 나타낸다. 아래의 이미지는 이를 토대로 자율주행 시스템이 안전 구역과 경로를 선택한 것으로, 안전 구역을 의미하는 녹색 울타리는 차량이 안전하게 진행하기 위해 다른 차량을 확인하고, 그 차량의 방향과 속도를 이해하고 있음을 나타낸다.
※ 자동차 산업의 트렌드를 선도하여 온 Automotive Report가 친환경 전기차, 자율주행차 등 자동차 산업의 패러다임 변화에 맞춰 새로운 환경에 능동적으로 대응할 수 있도록 관련 기술과 솔루션을 한 번에 만날 수 있는 「제3회 Automotive Conference 2018」을 마련합니다. 이 행사는 5월 16일 신도림 쉐라톤 서울 디큐브시티 그랜드볼룸(6층)에서 진행된다. 등록 신청은 이곳에서 할 수 있습니다.
