
도움 | 사재훈 사무국장, 한국파워링크협회·김루가(Lukas Emersberger) 연구원, 한국파워링크협회
정리 | 윤진근 기자(yoon@iomedia.co.kr)
목차
POWERLINK의 기술들
3) 마스터 | POWERLINK 장비 개발을 위하여
POWERLINK 프로토콜을 활용하기 위해서는 두 가지 장비가 필요하다. 슬레이브 기기와 마스터 기기가 그것이다. MSD 2016년 1월호에서 살펴보았던 슬레이브 장비에 이어, 마스터 장비를 개발할 수 있는 방법에 대해 알아본다. 파워링크협회가 제공하는 자료의 총본산, openPOWERLINK 누리집을 활용해 장비를 개발하는 과정을 살펴본다.
openPOWERLINK 누리집(openpowerlink.sourceforge.net)에서 POWERLINK 마스터 및 슬레이브 관련 소스코드를 모두 내려받을 수 있다. POWERLINK 프로토콜 제품 개발자를 위한 다양한 정보를 담고 있음은 물론이다.
POWERLINK 프로토콜 스택
openPOWERLINK를 사용하는 이들의 목표는 하나다. 우수한 장비를 개발·제작하는 것.
이러한 사용자의 목적을 돕는 것이 바로 POWERLINK 프로토콜 스택이다.
프로토콜 스택이란, 각 레이어 별로 정의된 프로토콜의 집합을 의미한다. POWERLINK 데모는 이러한 프로토콜 스택의 사양서를 포함한 다양한 리소스들을 포함하고 있다.
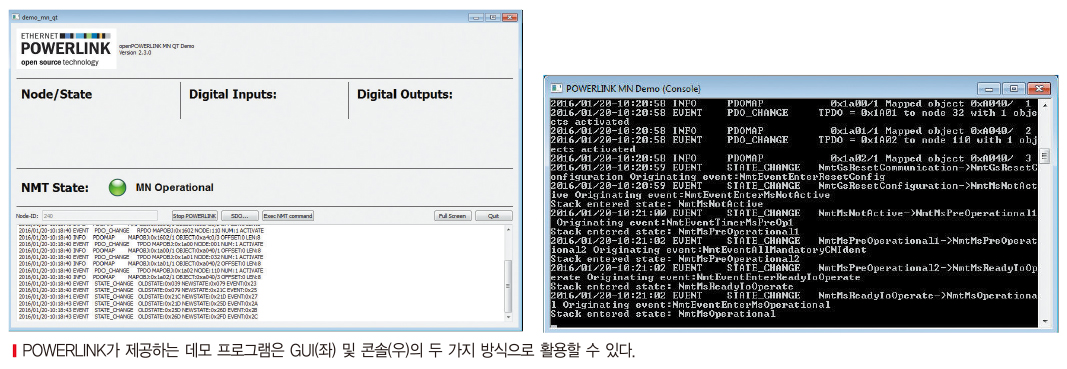
프로토콜 스택을 적용하는 것은 매우 간단하다. 소스포지 누리집에서 내려받을 수 있는 데모 패키지에는 GUI와 콘솔 모드로 각각 실행할 수 있는 마스터와 슬레이브가 포함되어 있다. 데모 패키지는 윈도우즈·리눅스·알테라·자일링스 등 4개 환경에서 구동할 수 있도록 준비되어 있다. 이 데모 패키지를 내려받아 조합하는 것이 곧 프로토콜 스택을 적용하는 것이라고 이해하면 쉽다.
POWERLINK 데모 패키지를 사용하여 크게 4가지 방식으로 프로토콜 스택을 적용할 수 있다.
개발자는 openPOWERLINK 데모를 내려받은 뒤, 개발 환경(윈도우, 리눅스, FPGA 등)에 맞추어 개발 관련 리소스들(*.c, *.h, *.cdc ,*.xml, *.lib 등)을 생성할 수 있다.
앞서 설명한 POWERLINK 데모 패키지를 실제로 적용하는 과정을 알아보자.
간단한 예로 사무용 노트북을 사용하여 마스터 시스템을 구축할 수 있다. ①sourceforge.net/projects/openconf/ 에서 네트워크 컨피겨레이션 툴, openCONFIGURATOR을 내려받고 ②이를 사용하여 연결하고 싶은 슬레이브 장치를 구성 및 빌드한 다음 ③노트북에 내려받은 데모 프로그램에 적용하기만 하면 된다. 이러한 과정을 통해 노트북은 POWERLINK 마스터 장비로 탈바꿈하게 된다.
데모 프로그램의 마스터 기능은 샘플로 3가지 슬레이브 장치를 구성할 수 있다. 지원하는 슬레이브 장치의 수가 적은 것은 말 그대로 데모 버전이기 때문이다. 정식 프로그램은 최대 239개까지 구성할 수 있다.
데모 프로그램은 GUI와 콘솔의 2가지 형태로 할용할 수 있다. 콘솔 비전은 윈도의 ‘명령 프롬프트’처럼 명령어만으로 장치를 구성할 수 있다.
데모 패키지를 바탕으로 마스터 장비도, 슬레이브 장비도 설정 및 구축할 수 있다. 따라서 두 대의 PC만 있다면 한 대를 마스터 장비로, 한 대를 슬레이브 장비로 활용할 수 있다. 마스터와 슬레이브 사이의 테스트를 구현할 수 있음을 의미한다.
CMake
앞서 설명했듯, EPSG는 소스포지를 통해 POWERLINK 프로토콜 스택을 제공한다. 하지만 스택만으로는 POWERLINK 장비를 만들 수 없다. 스택의 종류에 따라 각기 다른 종류의 확장자 등이 필요하기 때문이다.
이러한 문제를 해결하는 것이 CMake 소프트웨어다.
CMake(Cross Platform Make)는 멀티 플랫폼으로 사용할 수 있는 Make의 대용품을 만들기 위한 오픈 소스 프로젝트로, 키트웨어와 인사이트 콘솔티엄에서 만들었다. CMake는 기존의 Make가 수행하던 작업을 수행하지는 않고, 지정한 운영체제에 맞는 Make 파일(마이크로소프트 윈도에서는 솔루션 파일) 생성만을 수행한다. Meta Make라는 별칭이 붙은 이유이다.
CMake의 가장 큰 이점은 유닉스 계열 OS 중심이던 기존의 Make와 달리 한 번 작성해두면 유닉스 계열은 물론, 마이크로소프트 윈도 계열의 프로그래밍 도구도 지원한다는 것이다. 즉, 개발자의 개발 환경에 맞는 리소스들을 자동으로 생성해주는 소프트웨어라고 설명할 수 있다.
CMake이 가지고 있는 또 다른 특징은 POWERLINK 스택의 마스터와 슬레이브 정보 중 원하는 정보만을 취사선택해서 컴파일한다는 점이다. 이를 통해 사용자가 원하는 장비에 최적화하여 컴파일 소스를 만들 수 있다.
개발자들이 많이 사용하는 소프트웨어 개발 도구(비주얼 스튜디오·이클립스·유닉스 메이크파일즈 등)에서 활용할 수 있는 것도 CMake 소프트웨어의 장점이다. 소프트웨어 개발 도구는 다양한 제품을 실질적으로 조립 및 조합하는 과정을 돕는 소프트웨어다.
정리하자면, CMake를 통해 원하는 기능에 맞추어 프로그래밍할 수 있다. 이후 결과물을 컴파일하여 비주얼 스튜디오 등의 소프트웨어 개발 도구를 통해 원하는 장비를 개발할 수 있다.
다양한 OS 지원한다
소스포지에서 내려받은 스택을 두 종류로 구분해보자. 윈도 및 리눅스 OS는 X86 스택을. 알테라나 자일링스는 임베디드(알테라와 자일링스) 스택을 필요로 한다.
여기서 CMake를 통해 개발환경을 지원하는 플랫폼 종류는 다음과 같다. 표의 X 표시가 실제로는 개발을 지원함을 나타내는 표시다.
하지만 스택마다의 표에 제시된 플랫폼에만 제품을 적용할 수 있는 것은 아니다. 여기에 수정을 가하거나 다른 스택을 구비하면 상이한 플랫폼에서도 이 자료들을 활용할 수 있다.
openPOWERLINK 스택은 소스포지 누리집을 통해 무료로 배포받아 사용할 수도 있지만, EPSG의 다양한 회원사들의 소프트웨어도 사용할 수 있다. 예를 들어 EPSG 멤버인 B&R이 제공하는 Automation Studio 소프트웨어를 통해 네트워크 컨피겨레이션 및 다양한 프로그래밍이 가능하며, 고급 기능을 보다 쉽게 적용할 수 있다.
CODESYS나 Automation Studio 등의 소프트웨어를 활용하여 보다 섬세하고 다양한 기능을 삽입하기 용이하다.

openPOWERLINK 누리집에는 POWERLINK 스택을 관리하는 항목은 물론, 사용자에게 피드백을 받을 수 있는 채널이 있다. 개발자들은 이를 게시판처럼 활용할 수 있다.
POWERLINK가 개방형 프로토콜이라고는 하지만, 프로토콜에 대한 이해가 부족하거나 사용 도중 문제에 맞닥뜨리게 되면 혼자의 힘으로 해결하기 어렵다. 파워링크협회는 이를 해결하고자 사용자를 지원할 수 있는 창구를 열어두었다. 이를 통해 사용자에 대한 지원과 파워링크의 버전 업이라는 상호발전을 꾀한다. 두 마리 토끼를 동시에 잡는 것. Support 항목의 Porting 항목에서는 하드웨어 및 소프트웨어 플랫폼과 관련한 계획과 아이디어 그리고 이슈를 나눌 수 있다.
입맛에 맞는 개발을
openPOWERLINK 누리집은 다양한 POWERLINK 버전에 따른 설명서 내지 지침을 지원하고 있다. 뿐만 아니라 POWERLINK와 관련한 모든 소스코드에 대한 정보를 아우르고 있다. 내려받을 수 있는 프로그램 기능이나 폴더별 설명 등은 물론이다. 이를 통해 사용자의 입맛에 꼭 맞는 개발을 구현할 수 있다. 다양한 선택사항을 제공한다.
보다 높은 장치 높은 성능을 원한다면 openPOWERLINK의 애플리케이션 라이브러리와 드라이버 라이브러리를 구분하는 편이 바람직하다. 높은 성능과 실시간성을 얻을 수 있는 방식이다. 리소스를 각각 구분하면 성능이 높아지기 때문이다. 반대로 애플리케이션과 드라이버를 통합하여 사용하면 보다 쉽고 빠른 적용을 실현할 수 있다.
다양한 정보 지원
누리집에는 POWERLINK 라이브러리와 드라이브 등에 대한 설명을 담고 있다.
경우에 따라 POWERLINK 장비를 알테라 혹은 자일링스의 임베디드 기반에서 개발할 수도, 윈도나 리눅스 환경에서 개발할 수도 있다. 각각의 기반 기술에 따라 스택 라이브러리와 드라이브가 달라진다. 누리집을 통해 각 개발 환경에 필요한 자료를 내려받아 적용할 수 있다.
누리집에서는 또한 데모 애플리케이션을 지원하고 있다. 임베디드(자일링스·알테라)·윈도·리눅스 등 여러 환경에 대한 데모 애플리케이션을 경험할 수 있다. (※ 여기서 임베디드란 하드웨어를 기반으로 한 보드를 의미한다. 편집자 주)
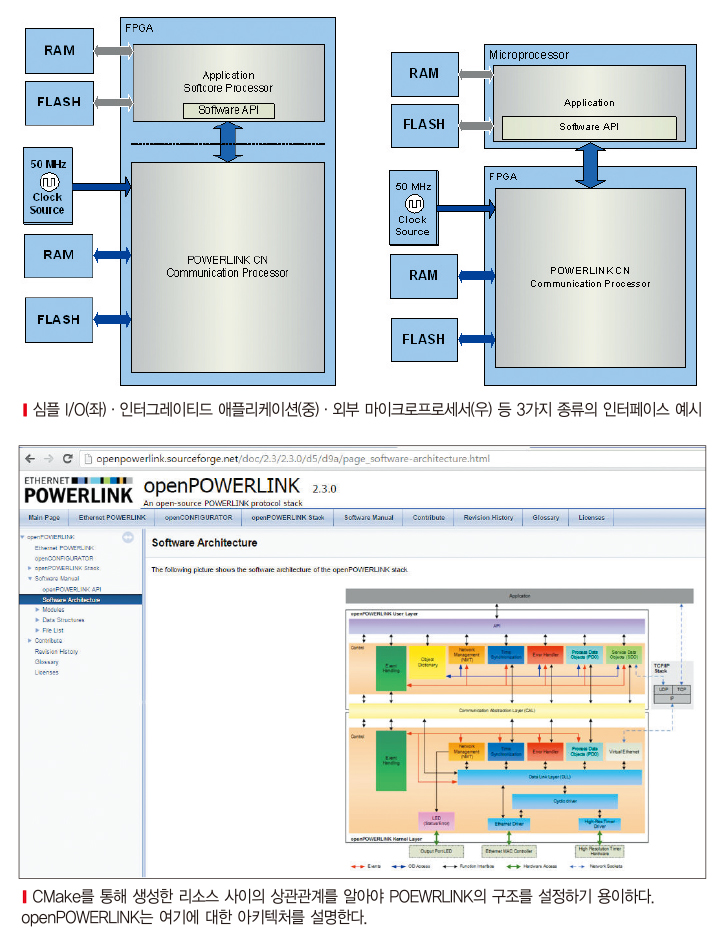
누리집의 소프트웨어 매뉴얼 항목에는 소스코드를 비롯한 다양한 정보가 들어있다. 개발자들이 쉽게 접근할 수 있는 가이드라인 및 도움말을 제공한다. 예를 들어 POWERLINK의 API(애플리케이션 프로그래밍 인터페이스) 모듈과 관련한 기술적인 설명 등, 소프트웨어 개발자들에게 필요한 각종 도움말을 담고 있다.
모듈 항목에는 오류 처리(에러 핸들링), DLL, 제어 모듈 등 다양한 상황에 용이한 정보를 담고 있다. 커뮤니케이션 업스트럭션 레이어(CAL)에 대한 설명이 대표적이다.
또한 누리집에는 파워링크협회 이외에도 비앤알, 시스텍, 칼리시토 등 POWERLINK 표준을 개발하는 주요 협력업체와 연결할 수 있는 창구도 마련했다. 보다 다양한 형태의 지원을 받을 수 있음을 뜻한다.
이더넷 기반의 이점
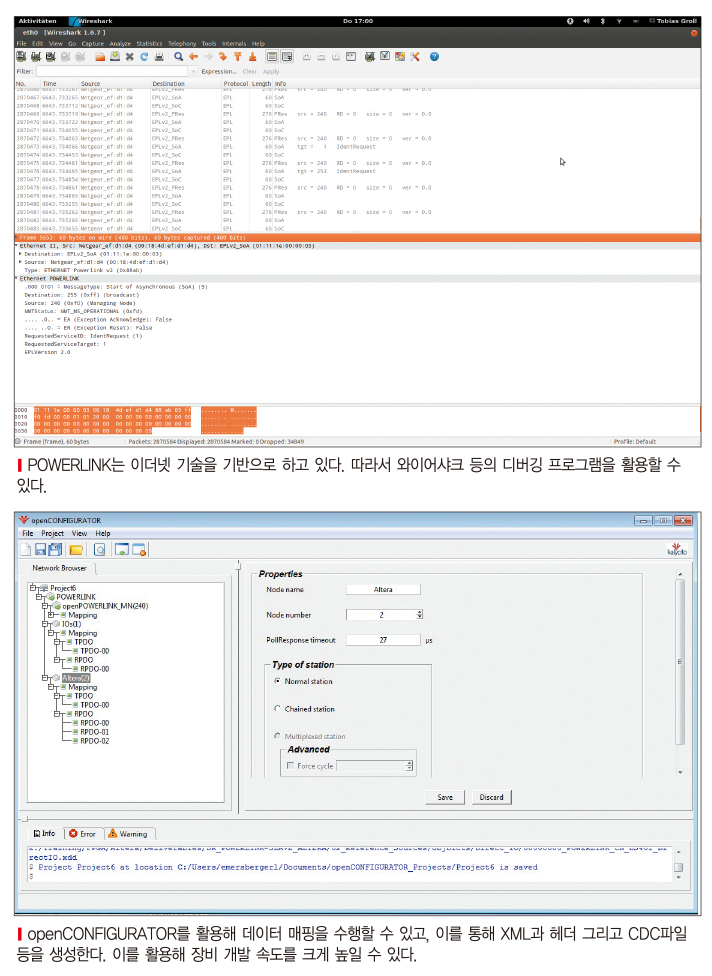
POWERLINK는 이더넷 기술을 기반으로 하고 있다. 따라서 개발 과정에서 제품의 작동 여부나 성능 등을 확인하기 용이하다.
이를 통해 얻을 수 있는 이점 중 하나는 와이어샤크를 비롯한 다양한 디버깅 프로그램을 사용할 수 있다는 것. 개발자들이 다양한 실험 및 검증을 위해 애용하는 소프트웨어다. 와이어샤크를 통해 작동 여부나 성능 확인, 오류 검증 등을 쉽게 할 수 있다.
지금까지 마스터 장비를 제작할 수 있는 가장 기초적인 과정을 살펴보았다. 앞서 나열한 과정을 거치면 아주 기본적인 마스터 기기가 탄생하게 된다.
하지만 마스터 장비는 독자적으로 활용할 수 없다. 손발이 될 슬레이브가 있어야 하는 것. 마스터에 연결하여 활용할 슬레이브 장비에 대한 설정이 필요한 이유이다.
마스터 기기와 연결할 슬레이브 기기를 제조하는 업체는 실로 다양하다. 이들 중 일부의 제품을 활용할 수도, 각기 다른 회사의 제품을 혼용할 수도, 혹은 독자 개발한 장비를 사용할 수도 있다.
슬레이브 기기의 종류가 어떻든, 슬레이브 기기를 활용하기 위해서는 각 기기의 디스크립션(설명) 파일인 XDD 파일이 필요하다. 이 파일에 대한 컨피겨레이션 정보를 마스터 기기에 적용해야 한다.
이 작업을 돕는 도구가 openCONFIGURATOR다. 이 역시 openPOWERLINK 누리집에서 내려받을 수 있다.
openCONFIGURATOR를 통해 사용자가 원하는 장비에 대한 디스크립션 파일을 적용할 수 있다. 원하는 슬레이브의 번호 설정과 사이클 타임에 대한 설정, 그리고 슬레이브가 가지고 있는 데이터에 대한 매핑, 전체 네트워크 구성까지 다양한 기능을 지원한다.
최신 openCONFIGURATOR는 이클립스 소프트웨어 개발 툴의 플러그인 형식으로 제공된다.
컨피겨레이션을 하기 위해서는 헤더 파일과 리소스 파일이 필요하다. openCONFIGURATOR를 통해 데이터 매핑을 하면 XML·헤더(*.h)·CDC 파일 등이 생성된다. 이 파일들을 누리집에서 내려받은 리소스들과 비교하여 수정된 사항을 적용하면 손쉽게 장비에 대한 설정을 마칠 수 있다.
외부의 프로그램으로도 컨피겨레이션 작업을 수행할 수 있다. 예를 들어 EPSG 멤버 중 하나인 B&R이 제공하는 오토메이션 스튜디오 소프트웨어를 활용하면 쉽고 간편하게 컨피겨레이션을 수행할 수 있다. 고급 기능을 보다 쉽게 적용할 수 있음은 물론이다. 외부 프로그램으로는 오토메이션 스튜디오와 CODESYS 등이 대표적이다.
파워링크협회의 지원
openPOWERLINK 누리집에는 POWERLINK 표준을 준수하는 장비의 개발에 대한 다양한 자료가 고스란히 담겨있다. 하지만 openPOWERLINK는 특정 응용사례 및 분야에 대한, 보다 자세한 알고리즘은 제공하지 않는다. openPOWERLINK가 제공하는 정보 및 자료는 실질적인 연결 단계에 적용할 수 있는 내용에 국한된다. 커다란 개념만을 제공하는 것. 이후의 작업은 개발자들의 몫임을 의미한다.
이 단계에서 도움을 주는 것이 파워링크협회다. 사용자가 필요로 하는 응용사례 및 원하는 사양만 명확하게 정의한다면, 파워링크협회가 목표 달성에 도움을 줄 수 있다. 파워링크협회는 응용사례에 대한 컨설팅 및 데모 프로젝트 제작 등을 수행하고 있다. 개발 비용과 시간을 크게 줄일 수 있는 열쇠다.
openPOWERLINK 누리집을 통해 장비를 보다 쉽고 간편하게 개발할 수 있다.
1. 소스포지에서 스택을 내려받는다.
2. CMake를 통해 필요한 솔루션 파일을 생성한다.
3. openCONFIGURATOR를 내려받는다.
4. 구성하고 싶은 네트워크 환경에 대한 컨피겨레이션을 마친다.
5. openCONFIGURATOR로 생성한 헤더 파일·XML·CDC 파일을 소스포지에서 내려받은 스택에 적용시킨다.
다섯 가지 단계를 통해 마스터에 대한 모든 개발이 완료된다.
이를 두 단계로 압축해보자. ▲openCONFIGURATOR에서 장치의 입출력 신호에 대한 컨피겨레이션을 마치고 ▲이를 POWERLINK 스택에 적용하면 개발이 끝나게 된다.
openPOWERLINK가 제공하는 다양한 자료 및 도구를 활용하면 마스터 장비의 개발단계가 아주 간단하게 변화한다. CMake로 다양한 자료를 만들고, openCONFIGURATOR 등을 통해 입출력 신호를 정의하기만 하면 커다란 개발이 끝나는 것. 개발자는 CMake와 openCONFIGURATOR를 활용하여 POWERLINK 표준을 준수하는 장비의 개발 속도를 현저하게 높일 수 있다.
부록 | POWERLINK의 사용 예
POWERLINK 기술을 적용한 실제 사례를 살펴보자.
1. POWERLINK, 휴머노이드 로봇 개발을 돕다
박승규 창원대학교 제어 및 전력전자 센터 교수는 수행 중인 로봇 연구개발(R&D) 프로젝트에 POWERLINK 솔루션을 적용하기로 결정했다. 기존에 사용하던 타 이더넷 프로토콜에서 POWERLINK를 활용하는 시스템으로 변경한 것.
박승규 교수에 따르면, 이는 POWERLINK만의 실시간성과 시간결정성 등의 이점과, 한국파워링크협회 및 EPSG의 신속하고 정확한 기술지원을 누릴 수 있기 때문이었다.
박승규 교수는 한국 휴머노이드 로봇 분야에서 높은 권위를 가지고 있는 인물로, 휴머노이드 로봇 개발의 첨단에 서 있다. 제어로봇시스템학회(ICROS)에서 역시 활발한 활동을 하고 있다.
이와 관련, 한국파워링크협회는 2015년 7월 POWERLINK 마스터 장비에 대한 교육을 시작으로 다방면으로 박승규 교수 연구팀을 지원하고 있다.
기관명 창원대학교 제어 및 전력전자 센터(Control & Power Electronics Center)
마스터 휴머노이드 로봇 제어용 컨트롤러
슬레이브 스텝 드라이브
이점 개방성과 현지 지원
2. 스마트폰, 보다 스마트하게 생산하자
오늘날 스마트폰은 수많은 사람들에게 있어 삶의 일부이다. 스마트폰의 개발은 플라스틱 산업에도 많은 변화를 가져왔다. 얇고 가벼우면서도 튼튼한 핸드폰을 제조하기 위해 짧은 공정 시간에 최대의 정밀성을 제공하는 생산 시스템이 필요하다.
플라스틱 하우징을 생산하는 전동식 사출기 제조업체인 우진플라임(구 우진세렉스)은 B&R과 협력하여 최고 수준의 생산성을 보유한 최신식 기계 솔루션을 개발했다.
우진플라임은 B&R과의 협력을 통해 새로운 고성능 사출기를 개발했다.
우진플라임의 책임 연구원인 정권 차장은 “B&R의 저 관성 서보모터와 빠른 응답성을 가진 컨트롤러를 통해 요구사항을 충족할 수 있었다”며, “B&R 엔지니어들과의 협력으로 매우 짧은 개발시간에 최적의 가격으로 최대의 성능을 가진 사출기를 시장에 선보일 수 있었다”고 말했다.
서보 시스템으로 보다 정밀하게
새로운 전동식 사출기 개발중 특히 중요한 요소는 사출 속도와 정밀성 두 가지 모두를 동시에 극대화하는 것이었다. 정권 차장은 “사출속도는 양품과 불량품의 차이를 만든다”며, “수지가 굳기 전에 가능한 빠른 속도로 얇은 금형 공간 안에 사출해야 한다”고 설명했다.
문제를 해결하기 위해 우진플라임은 다축동기의 분산화된 모션 제어 컨셉을 적용했다. 이 시스템은 메인 컨트롤러와 통신하지 않고도 드라이브 간 통신을 통해 속도와 토크를 동기 제어할 수 있다.

POWERLINK로 다축 동기화를
통신 프로토콜 POWERLINK는 드라이브 간 동기 제어에 가장 큰 역할을 했다. 두 개 이상의 서보 드라이브가 POWERLINK를 통해 메인 CPU에 연결되면, 모든 축들의 위치와 토크 및 속도 정보가 빠르고 정확하게 드라이브에서 드라이브로 직접 교환된다.
정권 차장은 “POWERLINK의 높은 성능 덕에 다축 모터를 완벽하게 동기화할 수 있었다”며, “매우 빠르면서 응답성이 높은 사출 공정을 실현했다”고 설명했다.
전동식 기계에 솔루션을 성공적으로 적용한 후, 우진플라임은 유압식을 포함한 대부분의 기계에 B&R 시스템을 적용하기로 결정했다. 우진플라임은 B&R과의 협력으로 모든 사출기의 빠른 사출 및 최고의 공정 품질을 달성하게 될 것이다.
