압전 효과(Piezoelectrical Effect)는 압전 세라믹이라 불리는 재료를 이용한 기능으로, 기계적으로 누르거나 찍는 힘 혹은 전화(電化)하는 움직임에 대응해 전하를 생성한다. 압전 모터에 이 효과를 활용함으로써 다양한 장치에 영향력을 발휘한다. 오늘날 점차 응용사례가 증가하고 있다.
1881년, 피에르 쿼리와 자크 쿼리는 실험에 한창이었다. 수많은 실험 끝에 수정 결정판(Quartz Crystals, 수정 진동자라고도 한다)에 압력이 가해지면 전계를 발생하며, 전기로 움직임을 실현한다는 것을 발견했다.
출력 신호(혹은 모션)에 수정 결정판을 사용하는 기술을 압전(Piezo)이라고 일컫는다. 압전이라는 말은 그리스어 Peizein이라는 말에서 유래했는데, 영어로는 ‘압축(Compress)’을 의미한다. 오늘날의 압전 소자는 티탄산 지르콘산 연(PZT) 분말을 전기적 접촉을 통해 촘촘하게 가열하고 통합해 만든다.
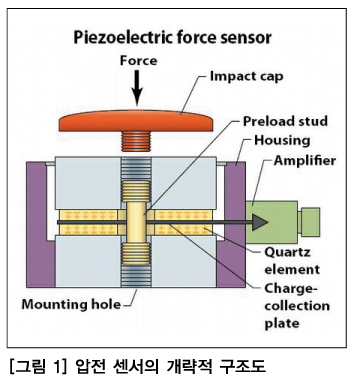
압전 센서(Piezoelectric Force Sensors)는 진동·움직임·충격·고속 압축·긴장 등 다양한 동력을 측정한다. 압전 센서 소자에 적용된 힘은 소자의 원자 구조 내에서 전하를 분리하고 정전 출력 전압을 만든다.
압전 모터는 일종의 ‘변형’을 활용하는 전기 모터다. 전계가 작용할 때 압전 소자들이 나타나기 시작한다. 이 원리를 활용한 소형 압전 모터는 현재 무수히 많은 응용사례에 쓰이고 있다. 기존 모터와 비교해 더 나은 성능과 효율 그리고 소형화 등을 자랑하기 때문이다. 압전 모터는 디지털카메라의 초점을 맞추는 기술부터 산업용 밸브, 장난감 그리고 군사 용도에 이르기까지 다방면에서 사랑받는다.
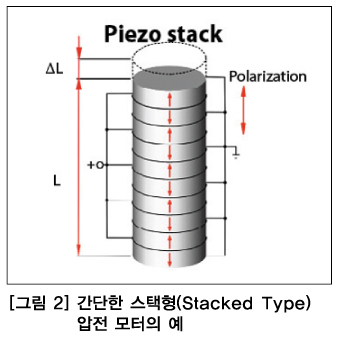
1 .단일 소자 압전 모터는 구동전압에 비례해 범위 확장과 출력을 만든다. 즉, 구동전압이 범위와 출력을 결정짓는 셈. 일반적으로 결정 공진 주파수(Crystal Resonant Frequency) 내에서 구동한다. 튜브 형태는 정밀 촬영 및 제거에 쓰인다. 시어(Shear) 형태는 뛰어난 횡 방향력을 자랑하지만 이동거리에 제한이 있어 다축 작업용으로 적합하다. 고속 응답 적층(Fast-response Stacked) 형태는 큰 힘을 출력한다.
2. 굴곡 가이드 압전 모터는 단순한 방식으로 작동한다. 모션 증폭기를 내장하고 있어 더 길고 곧은 스트로크를 자랑한다. 스트로크는 수 ㎜ 단위로도 조절할 수 있다.
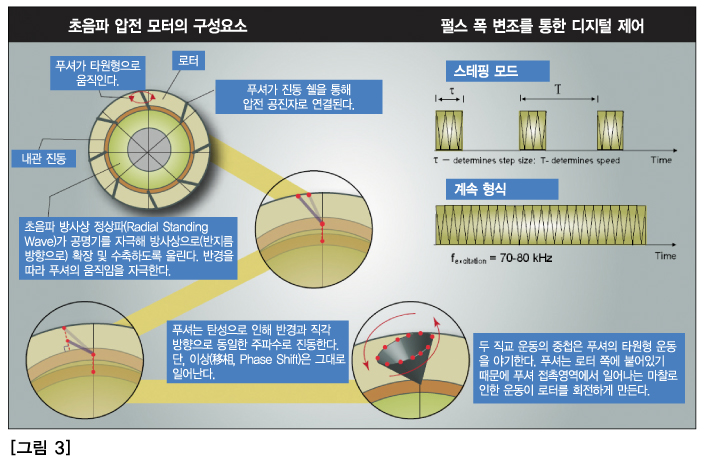
3. 정상파 압전 모터. 초음파 압전 모터라고도 한다. 이 모터는 선형 혹은 회전형 모터를 통해 만들 수 있다. 고정자가 만드는 고주파 진동을 활용해 제한이 없는 움직임과 고속 그리고 몇 밀리초가량의 빠른 응답을 달성한다. 모터는 마찰에 의해 미끄러지거나 회전하는 움직임으로 바뀐다. 이때 해상도는 40㎚ 정도로 제한된다.
회전형 초음파 압전 모터는 푸셔(Pushers)가 진동형 구조를 통해 압전 공진자(Piezoresonator)와 연결된다. 초음파 방사상 정상파(Ultrasonic Radial Standing Wave)는 공명기에 전기적 자극을 가함으로써 방사상 확장 및 접촉을 실현한다. 결과적으로 방사상에서 푸셔 이동에 자극을 준다. 특유의 탄성 때문에 푸셔는(비록 위상 변이를 사용하긴 하지만) 링의 반경과 직각 방향으로, 그리고 동일한 주파수로 진동한다. 두 직교 운동이 중첩되면서 타원형 푸셔 운동이라는 결과를 낳는다. 푸셔가 로터와 반대로 움직이는 과정에서 스프링 하중을 받는다. 이 과정에서 푸셔와의 접촉지점에서 마찰을 이용한 움직임을 만나 로터를 회전할 수 있는 원동력을 생성한다.
선형 초음파 압전 모터의 경우 압전 소자는 생성되는 진동과 직각으로 결합한다. 이를 통해 직접 구동 리니어를 구동하고 있는 나사를 회전 및 변환할 수 있다. 일반적으로 2채널 사인파 혹은 방형파가 수 kHz 범위의 초음파 주파수(이는 나사의 공진 주파수와 일치함을 의미한다) 내에서 압전 소자에 인가된다.
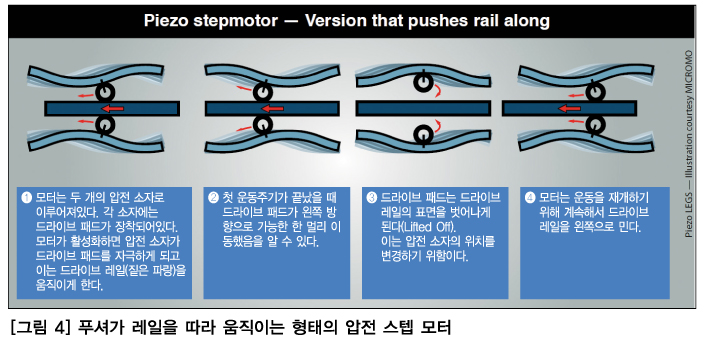
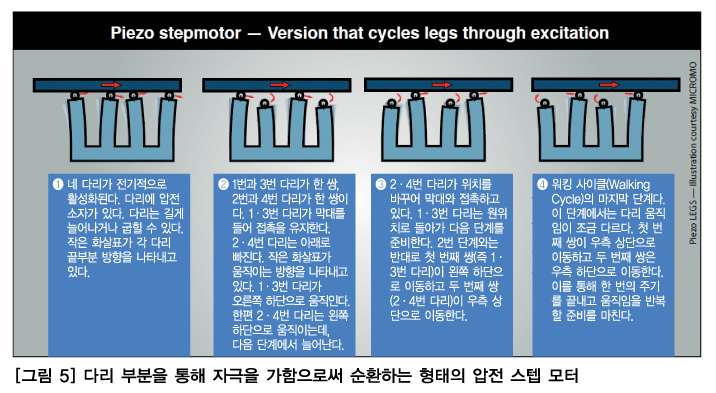
압전 스텝 모터는 각기 다른 상태에 놓인 일련의 수정을 생성한다. 이때 공동으로 작업할 수 있도록 변형을 가하기 위해 수정을 일명 ‘애벌레 다리’ 모양으로 정리 및 배열한다. 이 스텝 모터는 거의 모든 범위 및 스트로크에서 파코미터 단위 해상도를 만족하도록 설계된다. 힘은 여타 압전 모터와 비슷하거나 기존 모터를 넘어서기도 한다. 몇몇 모터는 100lb가 넘어가는 경우도 있으니 조심해야 한다.
로터리 압전 스텝 모터는 잠금 혹은 동기 모드를 통해 수정을 순환시킨다. 모터의 외장재나 고정자에 연결되는 것이 일반적이다. 한 수정 그룹은 액추에이터 로터를 활성화하는 역할을 한다. 두 번째 수정 그룹이 트리거를 유지함으로써 세 번째 그룹이 자유롭게 움직일 수 있도록 만든다. 움직이고 있는 그룹을 좇던 첫 수정 그룹이 해제되면, 뒤따르던 세 번째 그룹을 제자리로 돌려놓는다. 마지막으로 두 개의 잠금 그룹 모두 원래 상태로 돌아간다.
선형 압전 스텝 모터 역시 로터리 압전 스텝 모터와 크게 다르지 않다. 잠금 및 동기 모드를 통해 가지고 있는 수정들을 순환시킨다. 모터의 외장재나 고정자에 연결되는 것이 일반적이다. 일반적으로 한 무리의 수정이 동기 상태로 들어가고, 나머지 두 그룹은 잠금 상태로 순환을 시작한다. 평행하고 틈이 좁은 두 표면 사이에 끼워 넣어 선형 운동을 만든다. 빠른 수정 왜곡(Quick Crystal Distortion), 즉 응답은 MHz 단위 주파수를 허용하며 초당 100cm의 속도를 자랑한다.
압전 모터의 이점
앞서 설명한 높은 해상도와 정확도 이외에도 압전 모터가 가지고 있는 장점은 다양하다. 압전 모터가 제공하는 주요 이점은 다음과 같다.
1. 압전 모터는 가열로 인한 고장이 나지 않는다. 작동하는 동안 이물질 등으로 인해 막힘 현상이 일어나도(이를 Jammed라고 한다) 걱정 없다.
2. 압전 모터는 높은 초기 토크 및 광범위한 토크를 제공한다.
3. 스틱 슬립(일부 전자 모터와 관련이 있는) 현상을 제거한다. 압전 모터의 빠른 시작·정지 기능을 통해 이를 실현할 수 있다.
4. 압전 모터는 일반적인 잠금 및 해제 기능을 설정할 수 있다. 과거에는 일부 로터리 형태에서 드리프트가 1아크초/시간 미만으로 무시해도 될 정도였다. 하지만 오늘날에는 드리프트가 커져 압전 모터의 기능이 유용하다.
5. 전자 모터는 기어 및 송전장치와 병행해 사용해야 한다. 또한 기계적인 저항력 및 허용 오차와 백래시 그리고 이력(履歷)현상을 나타내야 한다. 반면 압전 모터는 직접구동장치이며, 따라서 더 높은 해상도 및 반복성을 자랑한다.
6. 압전 모터의 전력 요구사항은 여타 장치에 비해 쉬운 편이다. 컨트롤러는 12Vdc 이하의 저 전압 장치로도 구성할 수 있다. 따라서 모바일 환경을 비롯하여 전력과 에너지에 제한적인 설계에 적합하다.
7. 압전 모터는 일반적으로 전자 방해에 영향을 받지 않는다. 따라서 MRI 및 그와 유사한 응용사례에서 유용하게 사용할 수 있다.
압전 모터 응용사례
오늘날 압전 모터를 활용한 무수히 많은 상품들이 설계 혹은 상용화 단계를 거치고 있다. 포토닉스·생명과학 연구·나노 기술 등의 분야가 대표적이다. 압전 모터가 가지고 있는 특유의 동적 성능 덕이다. 압전 모터를 활용한 응용사례 중 대표적인 것들을 소개한다.
1. 의료 장비
압전 모터는 다양한 의료 장비에서 활약하고 있다. 초음파 이미터·수정(Fertilization)·초소형 모니터링 장비·수술용 로봇·픽 앤 플레이스·임상시험약 제조 및 투여·세포병리학의 세포 삽입 및 세포 영상화·피부과 및 안과의 레이저 광선 조종·3D 스캐닝 등, 병원에서 볼 수 있는 거의 모든 장비 및 분야에서 활약한다.
예를 들어 빛간섭촬영(Optical Coherence Tomography, OCT) 분야에서 압전 모터를 사용함으로써 검사용 거울 및 영상 광학계를 빠르게 움직일 수 있다. 광간섭식으로 3D 영상을 만들고자 한다면 압전 모터를 통해 광섬유를 축 방향 및 횡 방향으로 이동하면 된다. 이동범위 및 거리가 정확해 전자 모터보다 더 높은 해상도를 자랑한다.
경피 약물 전달(Transdermal Drug Delivery) 분야에서도 압전 모터를 찾아볼 수 있다. 무침 인슐린 주사기가 대표적이다. 압전 모터를 기반으로 한 비침습성 마이크로서저리 로봇 드릴과 핀셋 그리고 가위 역시 압전 모터 사용이 빠르게 늘어나고 있다.
마지막으로 치열 교정과 수면성 무호흡 환자 치료를 위한 3D 콘 빔 영상이 있다. 구강 영상을 촬영해 제품을 입 모양과 꼭 맞게 만들 수 있도록 돕는다.
2. 청력 연구
내이에 있는 모세포(毛細胞)는 일종의 기계 감지기다. 나노미터 크기의 감각털(Sensory Hair) 뭉치의 변화를 감지해 이를 전기 신호로 변환하기 때문이다.
지난 2007년 버지니아대학 의학부 신경과학부에서 실시한 연구 프로젝트에서는 귀의 털을 모사하는 데에 압전 기능을 사용했다. 실험을 통해 내이의 정상적인 생리와 병리 생리에 대해 알아보기 위해서였다.
이들이 실시한 최근 연구에서는 쥐 귀의 털 뭉치를 압전 모터로 매핑한 뒤 복제하는 데에 성공했다. 연구팀의 최종 목표는 청력과 균형 감각이 결핍되어있는 사람들의 문제를 해결하는 것이다.
3. 벌레 크기 로봇
고체 다리와 턱을 가진 개미 크기의 로봇이 새로운 응용사례들을 만들 수 있을 것으로 보인다. 퍼듀 대학 연구팀이 개발한 설계에는 여러 압전 빔(Piezoelectric Beams)으로 만든 다리가 포함되어있다. 기존 압전 기술과는 다른 개념으로 접근하고 있어 흥미롭다.
컴퓨터 시뮬레이션은 반도체 산업과 동일한 제조기술을 사용해 이 ‘벌레’를 대량생산할 수 있을 것이라고 진단했다. 또한 쓰레기 더미를 뒤지거나 죽은 고기를 먹듯 주변 환경으로부터 진동 에너지를 획득해 전원을 충전할 수 있다. 삼각대 모양의 걸음을 통해 고르지 못한 지형이라도 안정적으로 통과할 수 있다.
일부 압전 재료 및 보는 팽창에 한계가 있다. 하지만 새로운 설계 방식을 통해 이러한 제한을 극복할 수 있다. 3개의 빔을 양 끝단에 모아 맞출 경우, 빔 중 하나 혹은 그 이상에 전압을 인가하면 놀라울 정도로 큰 측면 운동(래트럴무브먼트)을 만든다.
4. 더 나은 안전벨트
오하이오 주립대학 스마트 차량 컨셉 센터의 마르셀 다피노 교수는 안전벨트와 압전장치를 통합하고자 했다. 안전벨트는 사고 시 탑승자를 보호하고자 만들어진 장치다. 벨트는 충돌 시 어깨에 메는 형식은 4000N, 허리에 메는 형식은 2500N이나 되는 힘을 받게 된다.
기존 안전벨트 역시 인명피해를 막는 효과가 있었다. 하지만 설계할 때마다 탑승자의 키나 무게 등을 고려할 수 있을 정도의 여유가 없었다.
연구팀은 탑승자를 최대한 보호하면서도 전체적인 시스템을 간소화하고자 했다. 안전벨트에 가해지는 힘을 제어하고자 안전벨트의 D링에 고체 압전 액추에이터를 설치했다. 그 결과, 충돌이 일어나면 안전벨트 띠에 부착된 나노 섬유 센서가 힘의 양을 측정할 수 있다.
5. 무인 항공기(무인 차량)
최근 한 실험에서 무인 항공기의 가변형 날개(Morphing Wing)에 40㎜ 압전 모터를 여러 개 모아 통합했다. 액추에이터에 유압을 공급하기 위해서다. 이 설계는 각 액추에이터 주변의 폐루프에 유체를 고정시킴으로써 유체 요구사항을 획기적으로 낮춤은 물론 유압관의 필요성을 없애고 무게 또한 낮춘다.
고주파 유압 모터의 모션 속도는 750~1,500Hz 진동 범위에서 600~1,200VA에 달한다. 어큐뮬레이터(유압장치에 있어서 유압펌프로부터 고압의 기름을 저장해 놓는 장치, 축압기라고도 한다. 출처 도해 기계용어사전)와 출력 피스톤 그리고 마이크로컨트롤러(이는 시스템 내에 있는 4개의 밸브를 활성화하는 역할을 한다)와 결합했을 때 유압유에 0.13%의 압력이 가해진다.
6. 위치 미세 조정
전자기술 및 의료 분야 응용사례에서는 서브마이크로미터 위치조정을 사용한다. 초점 조정·스캔·수정 및 조절·점검 및 조절 작업이 대표적이다. 이 분야에서 역시 압전 모터가 영향력을 발휘한다. 나노미터 단위까지 정확하게 이동할 수 있기 때문이다.
측정 응용사례를 예로 들어보자면, 압전 모터는 센서가 기하학적 데이터를 기록하는 소형 짐 운반 응용사례에서 선형 액추에이터에 전원을 공급함으로써 활약할 수 있다.
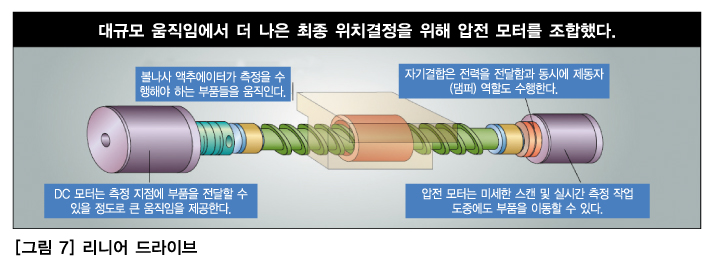
기술이 많이 진보해왔다고는 하지만, 아직까지 압전 모터는 단독으로 사용하기에 부적절한 제품인 것이 사실이다. 전원 공급이 가능한 길이와 허용 가능한 무게 등에 한계가 있기 때문이다. 또한 부품을 ‘활동적 측정’ 영역으로 옮기거나 빼오는 데에 많은 시간이 필요할 우려도 있다. 특히 고해상도 영상을 취하기 위해 다단식·넓은 스텝·끝없이 작아지는 기어 등이 저속으로 움직이면서 협업하면서 문제가 커진다.
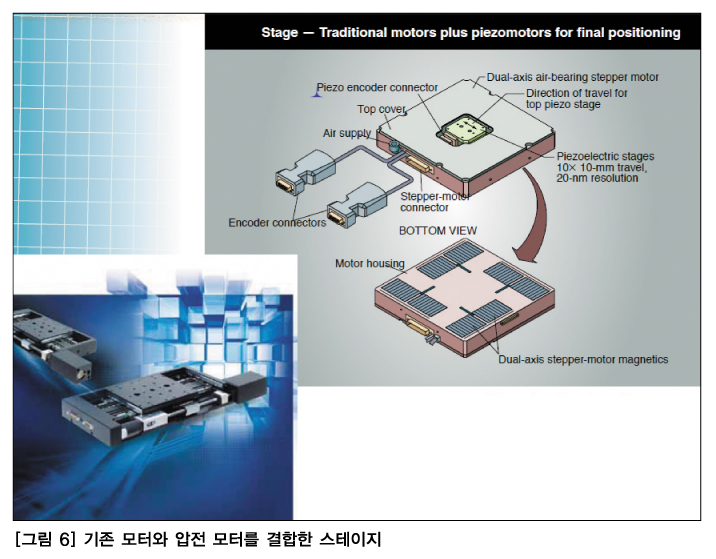
이를 해결하기 위한 방법은 다양한 모터를 조합하는 것이다. 압전 모터와 DC 모터를 일반 축에 함께 장착해 사용하는 것. DC 드라이브는 빠른 공급 속도를 통해 신속하게 작업을 수행하는 메커니즘을 실현한다. DC 드라이브가 목표물에 도달하기만 하면, 아무리 어려운 움직임이라 하더라도 압전 모터가 높은 동적 해상도를 제공한다.
듀얼드라이브 액추에이터는 가속을 실현해 전력 없이, 그리고 불필요한 열 없이 로터리 압전 모터로 전환케 만든다. 영구자석 커플링을 거침으로써 0.5㎜/초 속도로 변환한다. 이 드라이브는 간접적으로 기계 축에 제동을 주는 역할을 하며 감폭 진동 및 안정화 시간을 줄여준다. 최대 대 최소 속도 비율 역시 백만 대 일을 넘는다(이중 액추에이터 기준).
초기의 큰 스트로크 위치 조정을 위해서는 일반 브러시 모터와 로터리 인코더를 벨로우즈 커플링 방식으로 축에 연결한 조합만으로 충분하다. 이러한 응용사례에서는 모터가 비교적 짧은 시간동안만 작동하며, 모터의 입열(入熱) 역시 무시해도 될 정도로 적다. 사용한 축의 정도에 따라 0.5㎜/초부터 100㎜/초에 이르기까지 다양한 속도를 낼 수 있다. 일반적인 위치 조정 요구사항에 적합한 이유이기도 하다. 7000rpm 및 16mNm이 일반적인 출력이다. 단, 기어 출력 비율은 조금 다르다. 자기 2채널 증분 인코더는 일반적으로 최대 회전 당 512펄스 가량 된다.
압전 로터리 모터는 1입방인치 크기에 70g 가량의 무게를 자랑한다. 0~3000Hz 전압 범위 내에서 제어할 수 있다. 자기유지력(Holding Torque)은 보통 90mNm정도이며 보간의 증가량은 0.35mrad가량 된다. 작은 축이 모터와 영구자석을 기계적으로 연결할 수 있게 도우며, 이후 볼나사에 연결한다.
고해상도 선형 측정 시스템은 연속적으로 움직임을 기록하고, 이 정보를 모터 컨트롤러로 전송한다. 이 방법을 통해 드라이브는 고 정밀 모드로 선형 포지셔너를 움직인다. 초당 0.00002㎜(즉, 20㎚) 내지 0.15㎜ 속도로 움직인다. 바텀 엔드(엔진의 크랭크 샤프트·메인 베어링·연접봉의 굵은 끝부분을 의미함. 출처 영어사전) 부분의 속도 정수(speed constancy)는 전용 리니어스케일의 분해능에 따라 달라진다. 반복 정확도는 100㎚ 이상이다.