선형 모션 시스템을 설계할 때의 고려사항 중 하나는 모터 기술에 대한 것이다. 또한 모터 기술을 선택하고 난 뒤에도 선택의 순간이 이어진다. 모든 응용사례에 들어맞는 완벽한 모터는 이 세상에 없다. 따라서 결정에 앞서 설계상의 균형을 고려해야 한다. 글|Dan Montone, Haydon Kerk Motion Solutions · Pittman Motors
선형 모션시스템은 셀 수도 없이 많은 기계 속에 탑재되어있다. 정밀 레이저 절단 시스템, 실험실용 자동화 기계장치·반도체 제조장비·CNC 공작기계·공장자동화, 이 외에도 열거하기조차 어려울 정도로 많은 분야에서 활약하고 있다.
우리 주변에도 선형 모션시스템은 많다. 승용차 내부의 좌석 액추에이터(Seat Actuator) 등 단순한 장치에서부터 제어 및 구동장치가 완비된 폐루프 위치제어 등 복잡한 장비에 이르기까지 적용 범위가 무궁무진하다.
그 내용이 단순하든 복잡하든, 선형 모션시스템은 한 가지 공통점을 가지고 있다. 특정 시간 동안 직선거리로 부하를 움직이는 것.
선형 모션시스템을 설계할 때에는 모터 기술에 초점을 맞추고 있는 경우가 대부분이다.
선형 모션 시스템을 설계할 때 발생하는 흔한 고려사항 중 하나는 모터 기술에 대한 것이다. 또한 모터 기술을 선택하고 난 뒤에도 선택의 순간이 이어진다. 모터를 설계할 때는 부하 가속에 대한 요구사항을 충족할 수 있고, 장치의 마찰을 중력의 영향에서 자유로울 만큼의 모터 크기를 선정해야 한다. 안전한 범위 내에서 최대 작동 온도를 유지해야 함은 물론이다.
어떤 모터를 선택해야 하지?
모든 응용사례에 적합한 ‘최고의 모터’는 없다. 하지만 특정 응용사례에 적합한 모터는 존재한다. 대부분의 증분형 모션(Incremental Motion) 응용사례에서는 선택 폭이 스테퍼 모터·브러시 DC 모터·브러시리스 DC 모터로 좁혀진다. 또한 복잡한 선형 모션시스템에서는 기계적인 전력 변환(예를 들어 엄지나사와 볼 나사·기어박스·풀리 사이의 변환)을 막기 위해 부하와 직접 연결된 선형 모터를 사용할 수도 있다.
직접구동 시스템을 통해 매우 높은 정확도와 반복도 그리고 위치결정 정도를 얻을 수 있다곤 하지만, 요동 모터(Rotray Motor)와 비교했을 때 비용이 매우 비싸며 복잡한 것이 단점이다. 요동 모터를 사용하는 구조는 가격이 저렴하며, 선형 운동 응용사례가 필요로 하는 사항을 대부분 충족한다. 하지만 부하를 운용하기 위해서는 ‘로터리 투 리니어’ 변환(즉, 전력 변환)이 필요하다.
스테퍼·브러시 서보·브러시리스 서보 모터는 모두 DC 모터를 염두에 두고 있다. 하지만 서로 미묘한 차이가 있다.
특정 응용사례에 적합한 제품을 고르기 위해서는 다른 두 모터보다 뛰어난 제품을 선택하는 것이 바람직하다. 전문가들은 이 과정이 설계구조 변수에 따라 크게 달라진다는 것을 강조한다. 결정에 앞서 설계상의 균형을 고려해야 하는 이유다.
출력 토크를 생성하는 가장 기본적인 방법은 AC 모터든 DC 모터든 동일하다. 자기장과의 상호작용을 통해 만드는 것. 하지만 DC 스테퍼와 브러시 서보 그리고 브러시리스 서보 모터 기술은 DC 전원을 공급해 장치를 구동한다.
단, 선형 모션 응용사례에서 DC 기술의 고정송신기법을 모터 권선에 직접 적용할 수 있다는 뜻은 아니다. 즉, 전자장치를 통해 권선의 전류(출력 토크와 관련 있음) 및 전압(출력 속도와 관련 있음)을 제어해야 함을 의미한다.
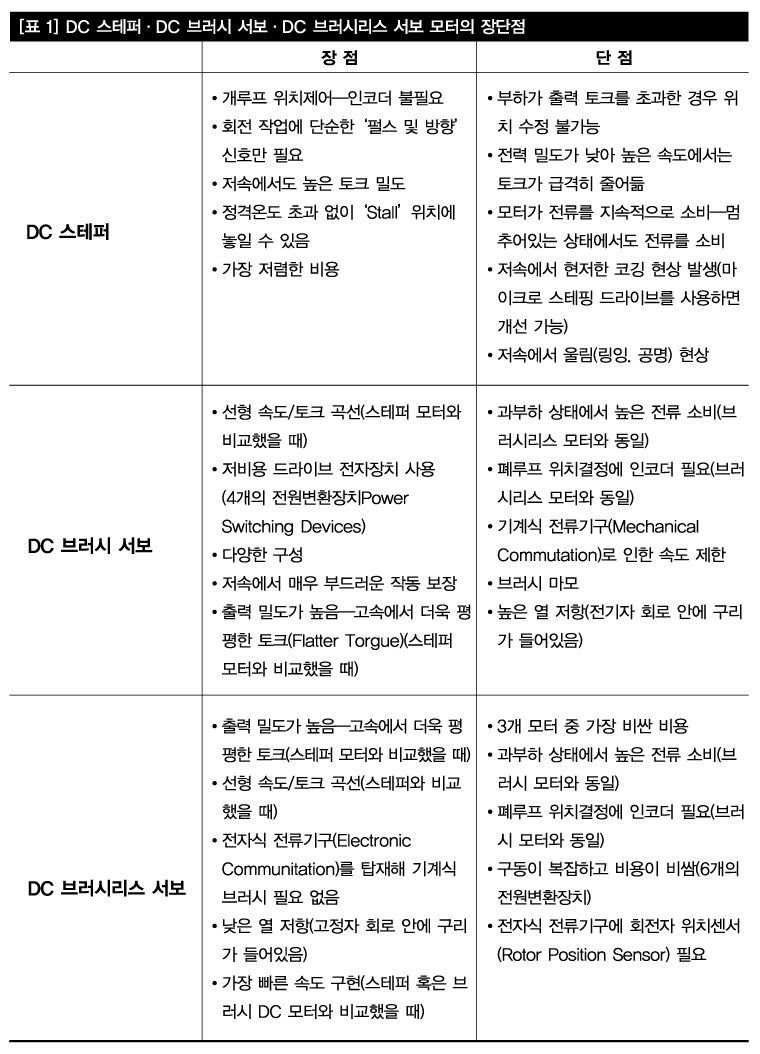
3개 기술의 장점과 단점은 표 1과 같다.
리니어 모션시스템의 전력 변환
어떤 종류의 모터 혹은 기계적 전송방식을 선택하든, 리니어 시스템 설계는 부하 및 부하의 무게가 얼마나 빨리 A지점에서 B지점으로 횡단해야 하는지를 결정하는 것으로 시작된다.
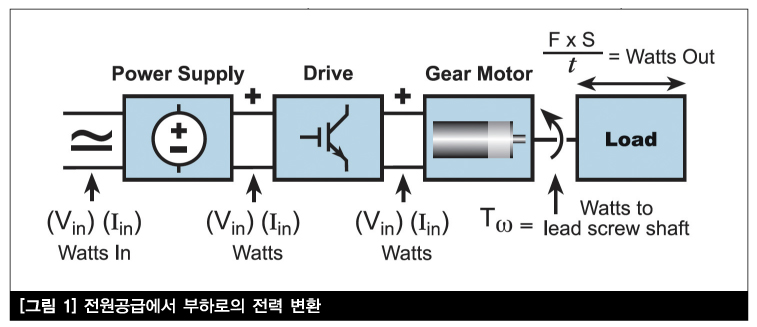
모터 형태와 크기 그리고 기계적인 설계를 결정하는 데에는 부하를 옮기는 데에 필요한 전력(와트)이 핵심 역할을 한다. 부하에서 시작해 궁극적으로는 모터 구동에 필요한 전원공급에 이르는 과정을 분석하는 것은 전체 장치 중 일정 부분에서 다른 부분으로의 전력 변환을 이해하는 열쇠라고 할 수 있다. 드라이브 내의 전압 및 전류의 모습을 하고 있던 와트는 특정한 시간동안 주어진 부하만큼 움직인 형태를 한 와트로 변한다.
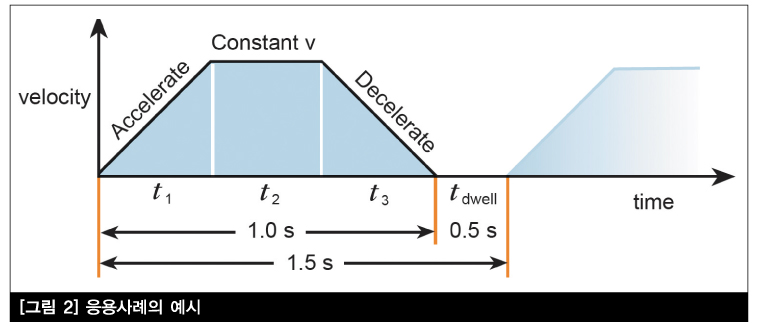
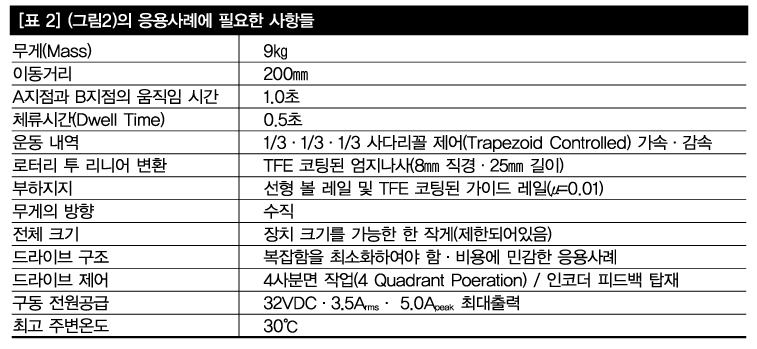
이 과정은 어떻게 이루어질까? 이를 설명할 수 있는 가장 좋은 방법은 부하가 A지점에서 B지점으로 이동하는 단순한 직선 레일 구조에 적합한 모터를 선택해보는 것이다. 이 응용사례의 예시는 그림 2와, 응용사례가 필요로 하는 사항들은 표2와 같다.
가장 좋은 접근법은 부하에서 시작해 다양한 전력 변환 요소들을 통해 모터로 되돌아가는 것이다. 작업에 필요한 단위를 정하는 것은 개인의 취향에 달려있지만, SI 기본단위(국제 단위계)를 사용하는 것을 추천한다. SI 단위로 작업하면 복잡하고 다양한 단위 변환이 불필요하며, 최종 결과를 영어 단위로 변환하기도 용이하다.
업계 전반적으로 사용하는 기호 및 단위는 표 3을 참조하면 된다.
요구 시간 내에 부하를 움직이기 위해 얼마나 많은 전력이 필요할까?
9㎏의 무게를 가지고 있는 물체를 중력 반대 방향으로 움직이기 위해서는 88N의 힘이 필요하다. 부하를 움직이기 위해 와트를 계산하는 것이 시스템의 여타 구성요소를 결정하는 출발점이 된다. 이는 9㎏의 무게를 가진 물체를 A지점에서 B지점까지 1초 안에 옮기기 위한 평균 전력이다. 단, 여기서 마찰 등의 감쇠 계수(System Losses)는 고려하지 않는다. 작업에는 다소 높은 모터 샤프트 동력이 필요하며, 장치 내의 여타 구성요소들에 따라 조금씩 달라진다.
P = (88N × 0.2m) / 1.0s
= 17.64W
이는 장치가 필요로 하는 피크 전력과는 다른 값이다. 가속 및 감속을 고려하면, 움직일 때의 개략적인 순시전력은 다소 높아진다. 어떤 모터 기술을 선택해야 할까?
스테퍼 모터는 간단한 드라이브 구조 및 상대적으로 저렴한 비용의 해결책이 필요한 사례에 적합하다.
하지만 장치의 부피 및 크기가 중요한 고려사항인 응용사례에는 스테퍼 모터 사용을 권장하지 않는다. 만약 17.64와트의 부하가 요구하는 최소전력을 감당하기 위해서는 매우 큰 스테퍼 모터가 필요하다(이때 감쇠 계수 및 즉각적인 피크 전력은 고려하지 않는다).
이 경우 DC 브러시리스 모터가 적절한 대안이다. 하지만 비용에 민감한 응용사례 및 간단한 드라이브 구조가 필요한 경우라면 이 또한 이상적인 선택이라고 말하긴 어렵다.
DC 브러시 기어모터와 인라인 유성기어헤드를 함께 사용하는 솔루션은 차지하는 면적이 적고 드라이브 구조가 덜 복잡하며 비교적 비용이 저렴하다. 엄지나사가 로터리 투 리니어 변환 수단으로 작동하므로 기어모터의 출력속도는 100rpm가량을 유지하며, 엄지나사와 너트 나사산 접촉부에서 발생하는 열을 막는 데에도 도움이 된다.
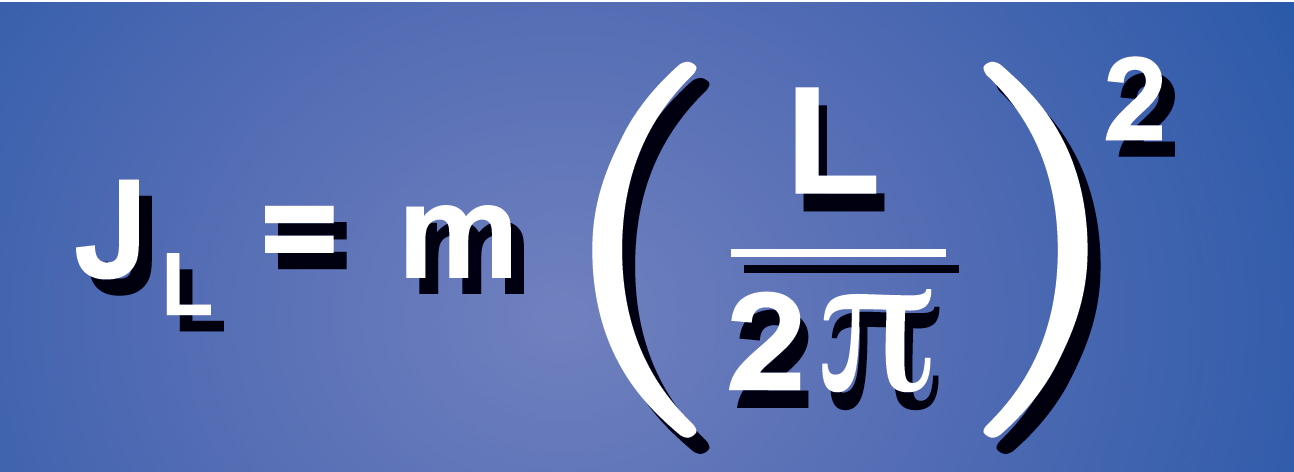
기어모터 샤프트(엄지나사 입력)에 있어 속도란 무엇일까? 관성 반사란?
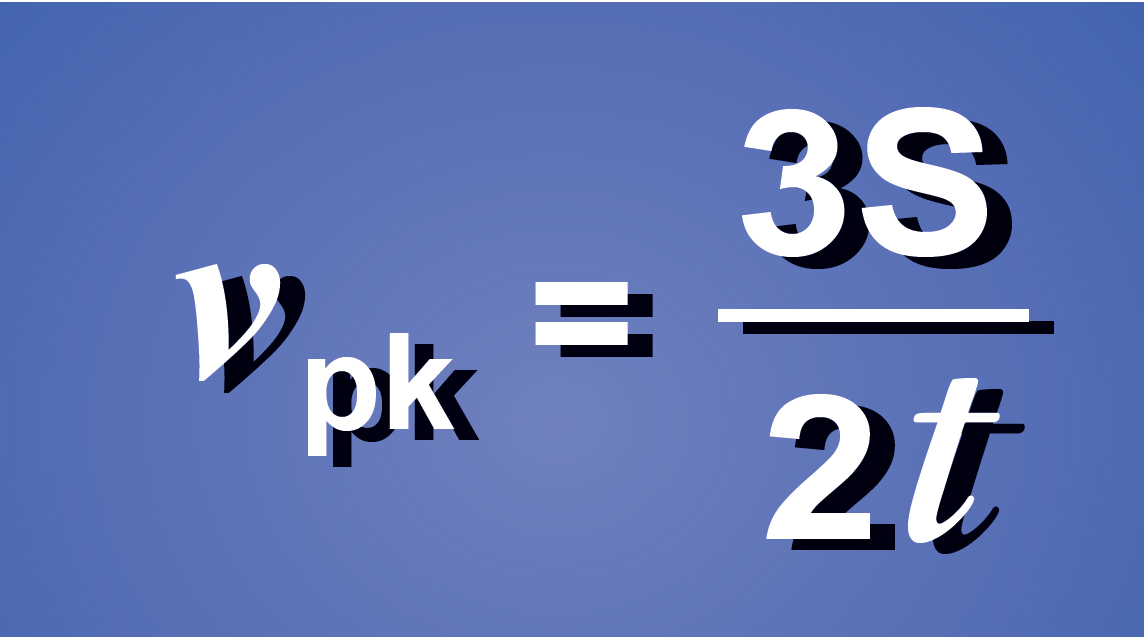
Step 1. 1/3 - 1/3 - 1/3 움직임 프로파일을 사용하는 응용사례의 최대 선형 속도를 계산한다.
Vpk = (3 × 0.2m) / (2 × 1.0s) = 0.6m / 2s = 0.3㎧
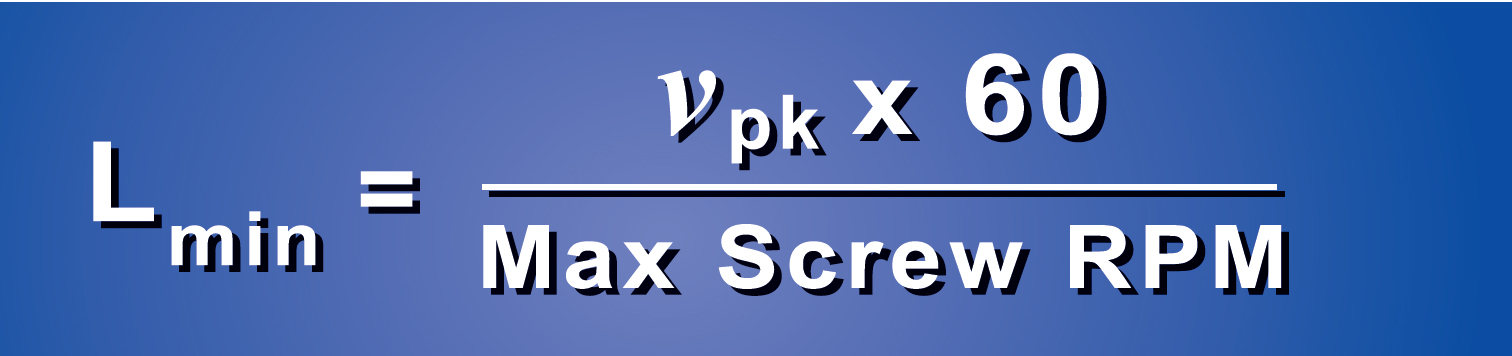
Step 2. 약 1000rpm의 엄지나사 속도를 유지하기 위해 필요한 최소 스크류 리드를 계산한다.
Lmin = (0.3㎧× 60) / 1000
= 0.018m = 18㎜
※ www.HaydonKerk.com의 나사 차트를 참조하면, 8㎜의 나사 직경에 가장 가까운 리드는 20.32㎜이다.
Step 3. 0.3㎧의 선형 속도에 대한 엄지나사의 최대 샤프트 속도(Peak Shart Speed)를 구한다.
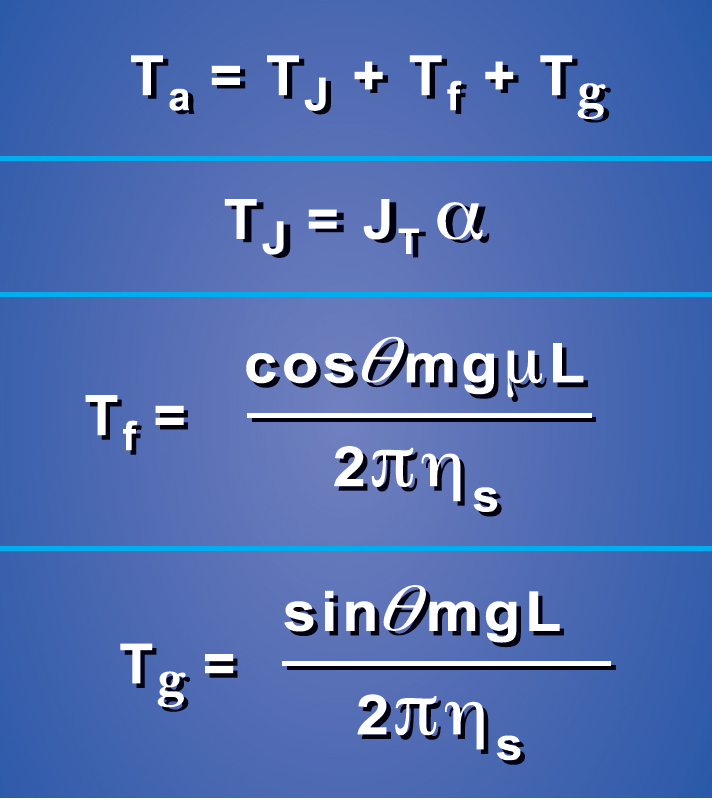
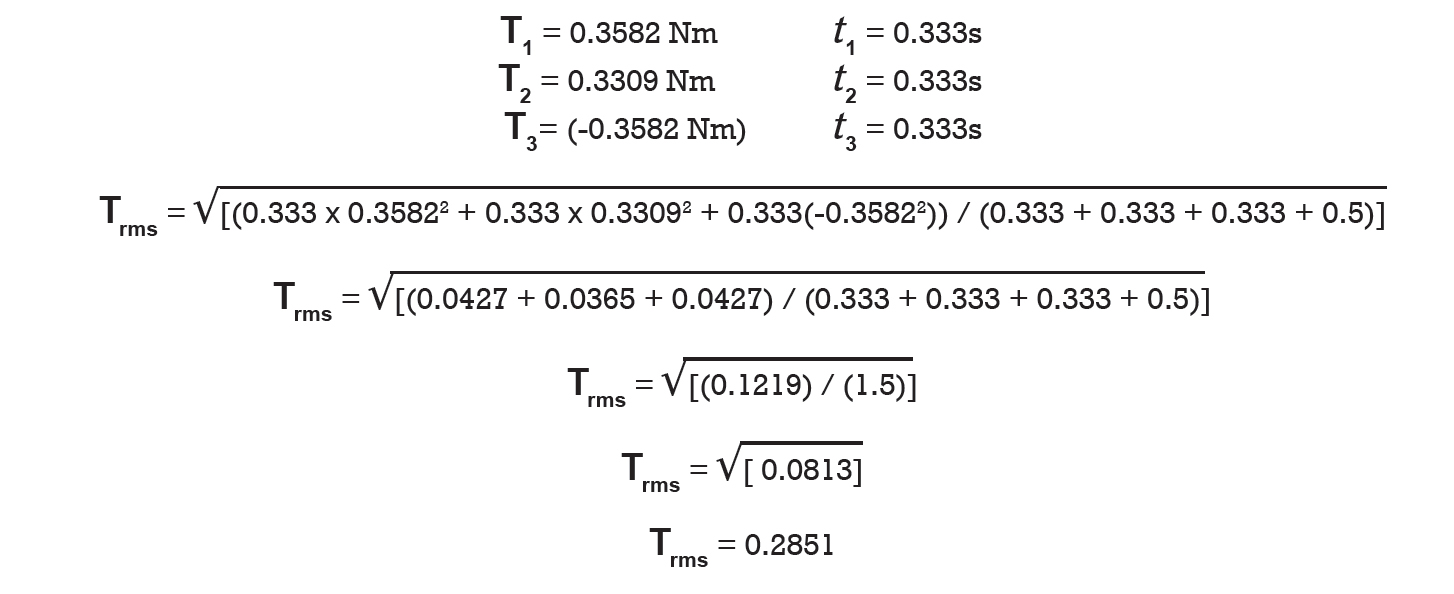
1초부터 움직임이 완료될 때까지 1/3-1/3-1/3 움직임 프로파일을 기반으로 한 토크 및 시간 간격에 대한 계산은 다음과 같다.
T1 = 0.3582Nm t1 = 0.333s
T2 = 0.3309Nm t2 = 0.333s
T3 = (-0.3582Nm) t3 = 0.333s
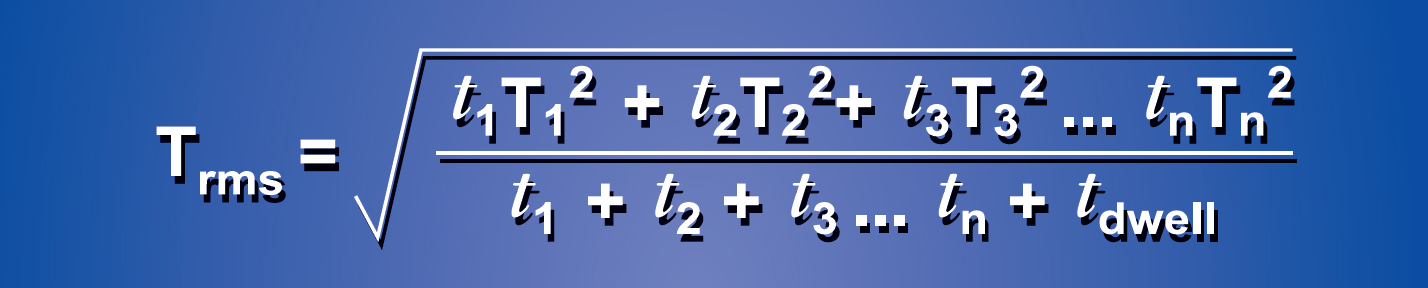
RMS 토크 요구사항은 모터나 기어모터의 열 상승을 이해할 수 있는 핵심 매개변수다. RMS 토크가 안전 동작 영역 혹은 DC 모터의 연속조작영역(Continuous Operating Area) 아래로 떨어질 경우 모터는 열에 의해 과부하를 일으키게 된다.
엄지나사 샤프트를 구동하기 위한 근사 전원(Approximation Power) 요구사항은 무엇인가?
Ppk = 0.3582Nm × 94.2㎮
Ppk = 33.74W
Pavg = [(9㎏)(9.8㎨)(0.2m) / 1.0s] / 0.86
Pavg = 20.47W
엄지나사 입력 샤프트(기어모터 출력 샤프트)에서 볼 수 있는 최종 부하 매개변수는 무엇인가?
Trms = 0.2851Nm
Tg = 0.3309Nm
Ta = 0.3582Nm
ωpk = 900rpm = 94.2㎮
Ppk = 33.74W
Pavg = 20.47W
기어모터는 엄지나사 샤프트를 통해 최대 가속 토크를 만들어야 한다. 질량을 가진 물체가 중력에 반해 움직이는 작업을 가속화하기 위해서다. 이를 통해 달성하는 정상 상태(Stedy-State)의 엄지나사 속도는 886rpm(반올림해 900rpm)가량이다. 이후에는 기어모터가 충분한 정상 상태 토크를 제공해야 한다. 일정한 속도로 중력에 반하는 질량 및 부하를 움직여야 하기 때문이다.
반대로 장치가 감속하는 동안에는 기어모터가 역방향 토크(Negative Torque)를 제공해야 한다. 사전에 정한 방법에 맞추어 부하를 멈추기 위함이다.
이 모든 과정이 모터가 멈추기 전의 1.0초 안에 일어나며, 이후 0.5초의 체류시간동안 작동을 멈춘다. 정지 과정을 마친 기어모터는 반전해 같은 움직임 프로파일을 따라 이동한다. 부하를 가지고 시작점으로 되돌아오는 것.
어떤 기어모터(모터와 기어박스의 조합)가 상기의 부하 매개변수를 충족할 수 있을까?
앞서 설명한 요구사항을 충족할 수 있는 기어모터 솔루션은 종류가 다양하다. 궁극적인 선택은 총 공간과 소음 그리고 가격 등 여러 요소들에 그 근간을 둔다. 또한 앞서 설명한 예제의 범위를 벗어나는 여러 항목도 처리할 수 있다.
Step 1. 전체 전력 요구사항 충족에 가장 가까운 모터를 선택하라.
엄지나사 샤프트에 필요한 평균 전력과 피크 전력은 각각 20.14W 및 33.74W다. 이는 부하 요구사항을 충족하기 위해 21W 정격 출력의 모터를 선택하는 것이 부적절함을 의미한다.
시스템 도처에서 일어나는 여타 손실로 인해 21W 정격 출력의 모터만으로는 불충분하게 되는 것. 엄지나사 샤프트의 전력은 모터에서 생산되어 기계적인 전력변환장치(기어박스)를 통해 전달받아야 한다. 따라서 기어박스의 효율 또한 중요한 고려 대상이다. 작업자가 시스템 내부에 설계하고자 하는 다양한 안전율 계수만큼이나 핵심적인 요소라고 할 수 있다.
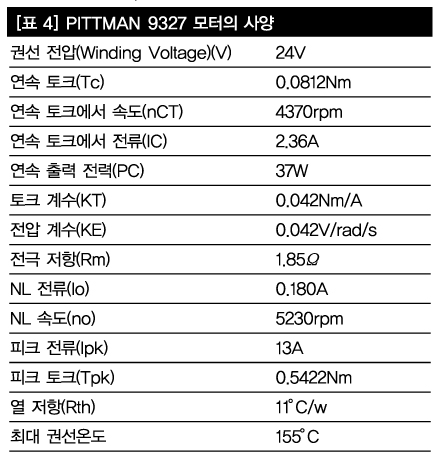
이러한 응용사례에 적합한 제품 중 하나는 PITTMAN 9237 모터다. 이 제품은 37W의 정격(연속) 출력 전력을 가지고 있는, 상대적으로 직경이 작은 브러시 DC 모터다. 이 모터의 사양은 표 4와 같다.
표 4의 모터는 24V의 기준 전압을 사용했을 때 연속 출력 전력이 37W다. 첫눈에 보기에 이 모터는 앞서 살펴본 응용사례가 필요로 하는 부하 요구사항을 충족하며, 추가적인 안전 계수도 확보할 수 있을 것으로 보인다.
고급 응용사례에서 쓰이는 매개변수가 32VDC 드라이브 전력 공급을 사용하는 경우에도 24VDC 모터 권선을 선택할 수 있다. 드라이브로부터 추가적인 전압의 여유 공간(Headroom)을 확보하기 위해서다(이 경우에는 약 33%정도의 여유 공간을 확보했다).
이는 추가적 전압 향상(Boost)에 중요한 역할을 한다. 이를 통해 단속 피크 전력(Intermittent Peak Power) 요구사항을 충족할 수 있다.
물론 보다 낮은 전압의 모터 권선 역시 응용사례에 활용할 수 있다. 하지만 이 경우에는 주어진 부하를 처리하기 위해 드라이브로부터 더 많은 전력을 공급받아야 한다. 24V 모터 권선은 32V 드라이브로부터 전압 부스트 기능을 사용할 수 있으며, 부하 전류를 최소화한다.
Step 2. 엄지나사 샤프트의 부하 매개변수와 등 모터에 대한 자료를 바탕으로 작업을 수행하기에 적절한 기어박스를 선택하라.
앞서 살펴본 응용사례의 경우 인라인 유성기어모터가 적합한 선택이다.
PITTMAN의 누리집을 참조하면, 24V 9237 PITTMAN 모터에는 G30A 유성기어박스를 사용할 수 있는 것으로 나타났다. 몇몇 종류의 빠른 계산(Quick Caculation)을 바탕으로 5:1 기어 감속비로 응용사례 요구사항을 충족할 수 있을 것이라고 추측했다.
5:1 기어 감속비를 활용해 이 기어박스를 안전하게 취급할 수 있는 최대출력토크는 2.47Nm이다. 앞서 살펴본 0.3582Nm의 피크 토크 요구사항을 가뿐히 넘는 수치다.
5:1 기어 감속비의 G30A 유성기어박스가 0.90의 효율을 달성한다고 가정했을 때 모터 출력 샤프트(기어박스로 들어가는)에서 다음과 같은 요구사항을 야기한다.
Ta @기어박스 출력(엄지나사 입력) = 0.3582Nm
→Ta(motor) @모터 출력 (기어박스 입력) = 0.0796Nm
Trms @기어박스 출력 (엄지나사 입력) = 0.2851Nm
→Trms(motor) @모터 출력 (기어박스 입력) = 0.0634Nm
ωpk @기어박스 출력(엄지나사 입력) = 900rpm = 94.2㎮
→ωpk(motor) @모터 출력 (기어박스 입력) = 4500rpm = 471㎮
Ppk(motor) @모터 출력 (기어박스 입력) = 37.5W(모터 샤프트 기준)
24VDC PITTMAN 9237 모터는 0.0812Nm의 연속 출력 토크와 2.36A의 연속전류 정격을 가지고 있다. 이 응용사례가 필요로 하는 RMS 토크는 0.0634Nm이다. 이는 기어모터(모터·기어박스)가 안전하게 RMS 토크 요구사항을 충족할 수 있음을 뜻한다.
9237 모터의 연속 정격 출력은 37W이고, 움직임 프로파일에 필요한 피크(단속) 전력은 37.5W이다. 얼핏 보기에는 부족한 것처럼 보인다. 하지만 이러한 상황에서도 모터를 안전하게 사용할 수 있다. 이 응용사례가 필요로 하는 RMS 토크 요구사항이 안전 동작 한계를 넘지 않기 때문이다.
드라이브 및 전원 공급이 부하 요구사항을 충족하는가? Step 1. 필요한 피크 전류를 계산한다.
Ipk = (0.0796Nm) / (0.042Nm/A) + 0.180A
Ipk = 2.075A Step 2. 필요한 RMS 전류를 계산한다.
Irms = (0.0634 Nm) / (0.042 Nm/A) + 0.180A
Irms = 1.690 A
Step 3. Ppk에 필요한 최소 버스 전압을 계산한다.
VBUS(min)= (2.075A × 1.85Ω) + (471㎮0.042V/㎮)
VBUS = 3.839 + 19.782V
VBUS = 23.621V ≈ 24V
위에서 설명한 계산에 근거했을 때, 드라이브 및 전원공급장치는 움직임 프로파일의 동하중 요구사항을 충족해야 한다. 전원공급장치의 전압이 32V이므로 최대 DC 버스 전압은 약 30V가량 될 것이며, 이를 위에서 언급한 최소 버스 전압 요구사항(24V)에 비하면 상당한 여유가 있는 것으로 볼 수 있다.
드라이브 및 전원공급장치의 최대 전류 정격 또한 응용사례가 요구하는 만큼의 RMS 전류 및 피크 전류를 충족한다.
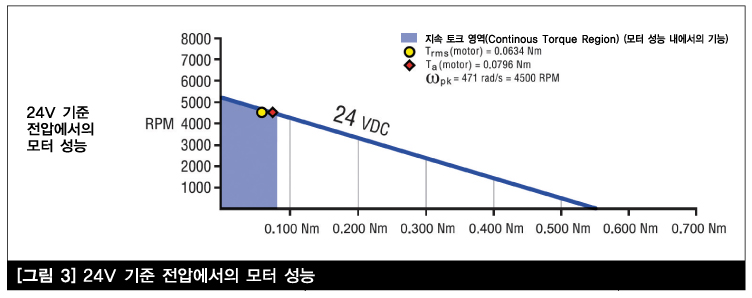
그림 3은 24V 기준 전압을 사용했을 때의 모터 성능을 공개한 그림이다. 그림 3을 통해 알 수 있듯, 토크 요구사항을 유지함과 동시에 4500rpm의 피크 모터 속도(기어박스로 들어가는)를 충족하기 위해 모터로 들어가는 전압이 조금씩 증가할 수 있다(단, 이는 모터 설계 제한범위 내에 한한다).
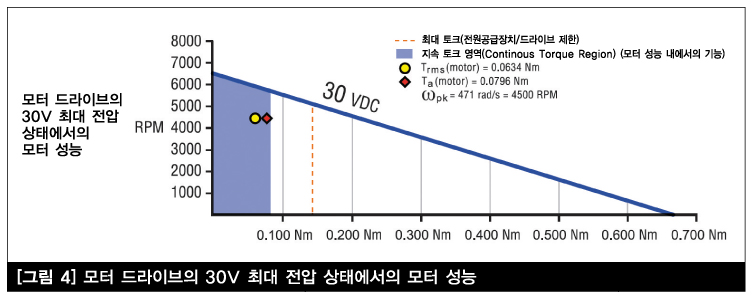
그림 4는 동일한 모터에 드라이브가 사용 가능한 30V의 최대 단자 전압(Maximum Terminal Voltage)을 사용했을 때의 변화를 나타내고 있다.
위와 같은 과정을 살펴보고 나면, 응용사례의 원동력이 어떤 것인지, 어떤 부품 및 요소가 견인차 역할을 하는지 명확히 알 수 있다.
위에서 살펴본 사례, 즉 DC 기어모터의 경우에는 움직임 프로파일에 걸쳐 맞닥뜨리게 되는 동하중 조건을 충족할 수 있는 크기를 결정하는 것이 중요하다. 이는 부하 지점(Load Point)이 변하지 않는 연속 작업환경에 쓰이는 모터 크기를 선택하는 것과는 현저한 대조를 이룬다.
증분형 위치결정 응용사례에서는 빈번한 시작 및 정지 작업 및 가속·감속을 제어하는 동안 더 모터가 열심히 작동케 하는 사용률(충격 계수)이 필요하다.
모터 크기를 결정할 때의 주요 관심사 중 하나는 모터가 안전 작동 온도를 벗어나지 않게 하는 것이다.
여기서는 RMS 토크 및 전류 계산이 가장 중요한 요소다. 전체 온도는 물론이고 특정 움직임 프로파일 내의 모터 온도 상승량도 추산할 수 있기 때문이다.
온도 상승량 및 모터 온도를 계산하기 위해 다음과 같은 방정식을 사용할 수 있다.
30℃ 주위 온도의 부하 조건 내에서 모터 온도는 몇 ℃까지 올라갈 수 있을까? Θr = [(Rth × Irms2 × Rm) / (1-(Rth x Irms2 × Rm × 0.00392/°C))]