전기 모터가 유체동력 액추에이터를 대체하고 있다. 엄격한 속도제어 및 정밀한 위치제어를 통해 이익을 얻는 응용사례가 그 대표적인 예다. 오늘날에는 몇몇 모터 역시 시장의 요구사항을 충족하기에 부족하거나 필요한 정도에 미치지 못하는 경우가 있다. 이 문제를 해결할 새 기술을 살펴보고, 스테퍼 모터 및 모터 제어기술을 통해 비용효율적인 성능을 가진 장비를 구축할 수 있는 방법을 알아본다.
Q. 서보모터와 스텝모터는 각각 어떤 사례에 적합할까?
A. 스텝 방식이든 서보 방식이든, 브러시리스 모터는 유지보수에 필요한 노력을 최소화하며, 오랫동안 작업을 지속할 수 있는 장비를 만드는 데에 도움을 준다. 스테퍼 모터와 서보모터는 또한 정확한 움직임을 제공한다.
서보모터는 일반적으로 힘에 대한 요구사항이 1hp를 초과하며, 모터 속도가 3000rpm를 넘는 응용사례에서 한층 뛰어난 효과를 발휘한다(물론 토크에 따라 수치가 달라지기는 한다). 또한 서보모터는 여느 모터보다 높은 피크 전력 및 더 빠른 속도를 제공한다.
스텝모터는 서보모터에 비해 가격이 저렴하며, 조율 및 세부조정 과정이 불필요하고, 관성이 일치하지 않는(Inertia Mismatches) 응용사례에도 견딜 수 있다. 장치가 작동을 시작하는 시점부터 최대 토크 생산능력을 활용할 수 있다. 이는 관성이 높은 부하를 빠르게 움직일 때 도움이 된다. 스텝모터는 일종의 높은 폴 카운트를 탑재한 동기전동기이며, 따라서 부드럽고 느리게 움직인다.
Q. 스텝모터에 단점은 없는가?
A. 스텝모터의 단점 중 하나는 동기화 손실(Loss of Synchronization)이다. 스톨링(Stalling)이라고도 하는 이 현상은 부하가 모터의 능력을 초과했을 때, 즉 모터가 부하를 감당할 수 없게 되었을 때 발생한다. 이 경우 모터는 유용한 토크를 생산할 수 있는 기능을 잃고 만다.
스텝모터는 또한 작동 중 열을 일으키는 경향이 있다. 스텝모터는 부하와 관계없이 모든 상전류(Full-Phase Current)를 사용하므로 100%의 토크를 만들기까지 전체 시간의 5%밖에 걸리지 않는다. 고 부하 요구사항을 처리하기 위해서는 상전류가 100%의 성능을 반복하도록 설정되어있어야 한다. 이는 발열의 원인이 된다.
또한 부하가 과하게 작동(Overdrive)하는 응용사례에서는 스텝모터 극이 부하가 모터를 끌어당기며 갑작스럽게 움직이는(Jerking) 현상의 원인이 된다.
Q. 그럼, 위와 같은 상황에선 값비싼 서보모터를 사용해야 하는가?
A. 과거에는 그랬겠지만, 지금은 아니다. 스텝모터가 가지고 있는 한계를 극복할 새로운 제어방식이 등장했기 때문이다. 기존 스테퍼 기술과 서보 기술을 융합함으로써 전자장치를 통해 스텝모터를 제어할 수 있게 된 것.
이러한 하이브리드 모션 기술은 스텝모터를 과거 서보모터의 영역이었던 다양한 응용사례에도 활용할 수 있도록 만든다. 예를 들어 슈나이더일렉트릭의 hMTechnology(이하 hMT)는 폐루프 제어에서 동기화를 유지하며, 순간적이거나 지속적인 과부하 및 지나친 가속 그리고 과한 저속 상황에도 불구하고 동기화를 놓치지 않는다.
hMT를 사용하면 과거 서보모터가 유일한 솔루션으로 통하던 장비에도 스텝모터를 적용할 수 있게 된다. 대표적 예로는 컨베이어 제어·웹 핸들링(연속공정)·제품 제조·폐루프 점대점 위치제어·드릴링(드릴로 리벳 구멍 등을 뚫는 것. 출처 건축용어사전)·와인딩 등이 있다.
Q. hMTechnology란 무엇인가?
A. hMTechnology(이하 hMT)는 폐루프 제어기술이다. 스텝모터에 이 기술을 적용하면 ▲일시적 혹은 지속적인 과부하 ▲극도의 가속 혹은 감속 ▲과도한 슬루 속도(Slew Speed) 등으로 인한 동기화의 손실을 방지한다.
hMT는 고정자(Stator)에 비례한 회전자(Rotor)의 위치를 모터 스텝의 관점에서 관찰한다. 회전자의 위치가 사전에 설정한 한계선 혹은 범위를 초과한 경우 공정에 개입함으로써 동기화의 손실을 막는다.
고정자의 속도를 가속 혹은 감속해 회전자의 속도와 같게 제어함으로써 고정자와 회전자가 정해진 범위 내에서 앞서거니 뒤서거니(Lead or Lag)하게 만든다. 사전에 입력한 모터 속도로 변환하거나 혹은 부하 요구사항이 사전에 명령한 속도 내에서 모터에 충분한 토크를 생성할 때까지 고정자의 정류 속도를 계속해서 바꾼다.
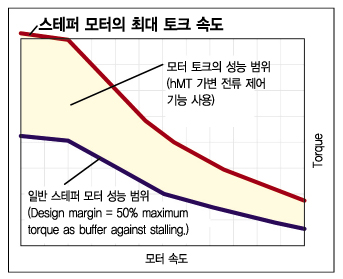
성능과 효율을 높이기 위해 가변 전류 제어(Variable Current Control)라는 기능을 사용해 이동에 필요한 양만큼만 전달하도록 상전류를 제한한다. 이를 통해 모터의 발열을 줄이고 효율성을 높인다.
Q. hMTechnology를 사용할 수 있는 모터의 종류는?
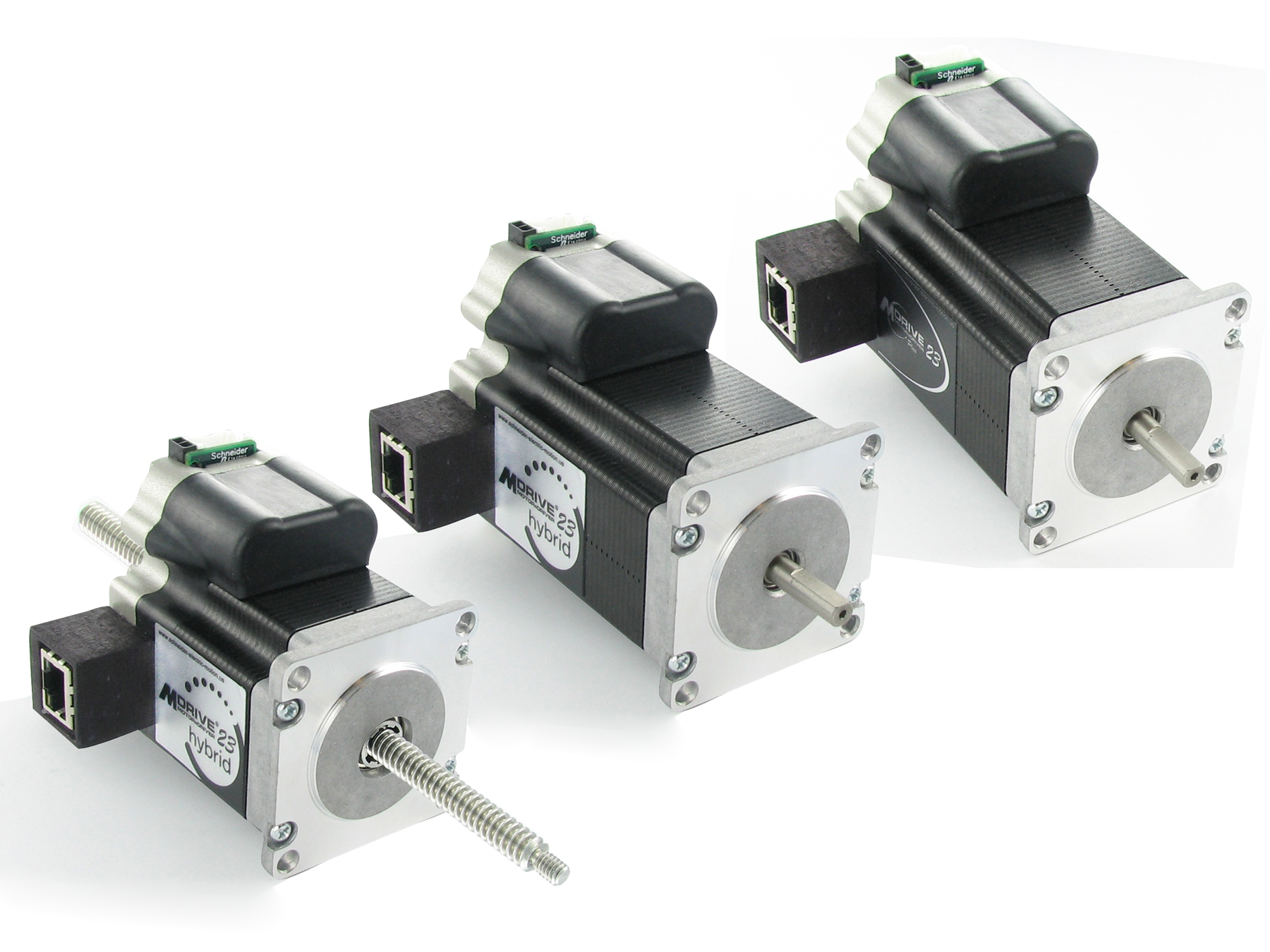
A. hMT 제어는 폐루프 Lexium MDrive를 통해서만 활용할 수 있다.
Lexium MDrive는 브러시리스 모터를 기반으로 했으며 내부에 인코더를 통합한 제품이다. Lexium MDrive는 제품 크기를 키우지 않고도 스테퍼 및 서보모터의 장점을 결합한다. 작동 온도와 소비 전력을 낮추고, 토크를 한층 높이며, 실시간 폐루프 제어를 실현한다.
Q. 설계에 제한이 있지는 않는지?
A. Lexium MDrive는 부품을 교환할 수 있다. 크기가 다른 각 부품들이 동일한 엔빌로프를 가지고 있기 때문이다. 또한 다양한 통신 방식·길이·작동 방식·메모리·커넥터 등의 선택사항을 가지고 있다.
Q. hMT는 어떤 작동 방식을 지원하는가?
A. Lexium MDrive에는 두 개의 핵심 제품 그룹이 있다. 펄스/방향 및 프로그래머블 모션컨트롤이 그것이다. Lexium MDrive 펄스-방향 입력은 다양한 방식으로 동작하도록 설정할 수 있다.
펄스-방향 방식에서는 다기능 인터페이스에서 전송하는 입력 신호를 통해 전자장치가 스텝모터를 움직인다. 신호의 종류로는 펄스 및 방향(Pulse and Direction), 횡방향(Quadrature), 위/아래(Up/Down) 등이 있다.
속력 제어(Speed-Control) 모드에서는 전자장치가 다기능 인터페이스의 아날로그 입력부에 입력한 기준전압에 근거한 속도로 모터를 움직인다(내부 클럭 발생기가 펄스를 생성한다).
속도 제어(Velocity-Control) 모드에서는 전자장치가 일정한 속도로 스텝모터를 움직인다. 직렬 인터페이스를 통해 입력받은 정수 값을 통해 속도를 결정한다(여기서 또한 내부 클럭 발생기가 펄스를 생성한다).
토크 제어 모드에서는 전자장치가 샤프트 내에 가해지는 토크를 일정한 수치만큼 유지한다. 이 모드에서는 다기능 인터페이스에서 전송하는 아날로그 입력에 의한 기준전압을 바탕으로 토크를 결정한다.
펄스 방향 직렬 인터페이스는 사용자가 작동 모드를 선택하고 매개변수를 구성할 수 있도록 돕는다. 구체적으로 말하면, 제어기로부터 슬루 명령이 내려졌을 경우 속도 방식(Velocity Mode)에 맞추어 전자장치를 구성하며, 작동 도중에 작동 방식이나 매개변수를 바꾸어야 할 때에도 유용하게 사용할 수 있다.
Q. 고 수준 모션컨트롤의 장점은?
A. 즉시 방식(Immediate Mode)을 사용하면 전자장치가 Rs-422/485 혹은 이더넷 필드버스 인터페이스의 1문자 혹은 2문자 ASCII 명령에 대응하게 된다. 이들 장치는 이더넷/IP·모드버스/TCP·프로피넷·CANopen 등의 네트워크를 통해 접속 및 제어할 수 있다.
그에 반해 프로그램 방식(Program Mode)은 장치 내에 탑재된 모션컨트롤러가 MCode 프로그래밍 언어(1문자 혹은 2문자 ASCII 연상 기호로 이루어져있다)를 사용해 다양한 기능·서브루틴·공정 상호작용 등을 구현한다. 내장 프로그램은 입력한 명령을 실행함은 물론, 전원이 켜질 때 혹은 즉시 방식 명령어 입력을 통해 명령을 실행하도록 설정할 수도 있다.
관리 시스템을 통해 설정한 명령을 수행하기 위해서는 지속적인 통신 연결이 필요하다. 하지만 Lexium MDrive는 I/O를 통해 작업 자료에 대응하도록 프로그래밍할 수 있어 지속적인 통신 연결이 불필요하다.