로터리 인코더는 현재 무수히 많은 응용사례에서 감지 업무를 담당하고 있다. 모터와 드라이브를 사용하는 장치는 물론이고 자동화와 관련한 모든 장비에도 쓰인다. 가전제품부터 엘리베이터 그리고 컨베이어 속도 조절에 이르기까지 다양한 일을 담당한다. 자동화 장비와 산업장비 그리고 로봇의 위치제어를 실현하기도 한다.
로터리 인코더는 모터 축의 전환 및 회전을 추적해 위치 및 움직임에 대한 디지털 정보를 생성한다. 증분형이든 절대형이든, 자기식이든 광학식이든 그 종류에 상관없이 동일한 역할을 수행한다. 산업 분야와 상업 분야 모두에서 로터리 인코더의 사용이 빠르게 늘고 있다.
로터리 인코더 개요
모터 축의 움직임을 추적하는 로터리 인코더는 다양한 산업장비 및 상업용 장비에 쓰이고 있다.
산업용 응용사례에서는 증분형 인코더를 AC 유도(Induction) 모터와 함께 사용하는 추세다(증분형 인코더는 상대적인 위치 정보를 필요로 하거나 비용 측면에서 문제가 있을 경우에 주로 사용하고 있다).
이와 대조적으로 절대형 인코더는 영구자석 브러시리스 모터와 함께 사용한다. 절대형 인코더는 각 위치에서 두 개의 결과를 출력한다. 따라서 샤프트의 위치를 보다 정밀하게 확정할 수 있다. 절대형 인코더는 서보 관련 응용사례에서 자주 사용한다.
또한 모터 고정자와 회전자의 위치를 동기화하는 데에 인코더 피드백을 사용하기도 한다. 전류 공급을 원활히 하기 위함이다. 회전자의 자석이 적절한 위치범위 내에 도달했을 때 전류를 권선에 인가함으로써 토크를 극대화할 수 있다.
로터리 인코더는 폼 팩터와 내구성 그리고 분해능 등을 구체적으로 명시한다. 증분형 인코더의 경우 장치가 회전할 때마다 숫자를 셈으로써 분해능을 정의한다. 절대형 싱글 턴 인코더의 경우 매 회전에 따른 위치를 측정해 분해능을 정의하며 이를 다중비트 문자로 나타낸다. 멀티 턴 인코더(다수의 360° 회전을 추적하는 장치)는 입력축 회전에 따른 위치의 변화를 명기하고 있으며, 내접기어의 변화를 나타내기도 한다.
측정을 필요로 하는 위치의 수에 따라 필요한 분해능이 달라진다. 예를 들어 0.001인치 단위로 증가하는 25인치 엄지나사의 이동거리를 측정해야 한다고 가정하자. 이 경우에는 25000포인트 분해능을 가진 절대형 인코더가 필요하다.
분해능은 비트 단위로 정의한다. 12비트 인코더는 이진수로 212, 십진수로 4096을 나타낸다. 따라서 12비트 인코더는 4096포인트 분해능을 가지고 있다.
응용사례의 정확도는 전체 시스템의 반복 횟수에 따라 달라진다. 인코딩 디스크(인코더의 하위 구성요소. 인코딩 디스크에 대해서는 차후에 설명한다)의 위치는 물론, 이론상의 위치와 실제 위치의 편차도 알아볼 수 있다. 12비트 혹은 13비트 인코더의 경우 최하위 비트 대비 반 카운트 이내의 정확도를 기대할 수 있다.
반복도란 인코더가 그 축이 특정한 위치에 다다를 때마다 같은 지점을 읽는 기능으로 풀이할 수 있다. 반복도는 실제 인코더 위치와 차후 동일한 지점에서 실행한 판독 사이의 편차로 정의한다. 반복도와 정확도 사이에는 별다른 관련이 없다고는 하지만, 인코더의 경우 일반적으로 반복도가 정확도 대비 4배 내지 10배가량 낫다고 여겨진다.
로터리 광학식 인코더
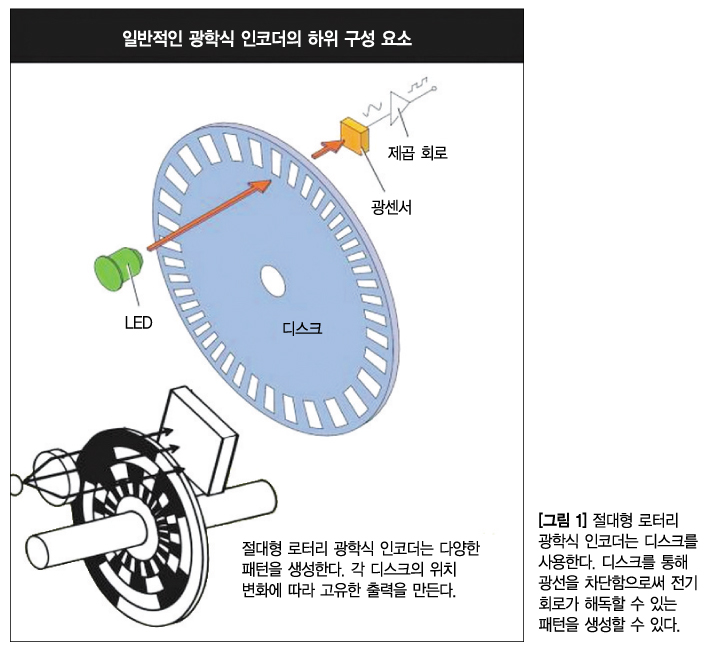
로터리 광학식 인코더(회전형 광학식 인코더)는 인코더 중에서도 가장 널리 쓰이는 형태다. 로터리 광학식 인코더는 LED 광원과 광 검출기, 코드 디스크 그리고 신호처리기로 구성되어있다.
디스크는 불투명한 부분과 투명한 부분으로 이루어져있다. 디스크는 LED 및 검출기 사이에서 회전하여 빛을 간헐적으로 차단하는 역할을 한다. 검출기는 일련의 빛을 추적 및 송신한 뒤 이 정보를 프로세서로 전송함으로써 움직임 정보를 도출한다.
로터리 광학식 인코더에는 두 가지 종류가 있다. 증분형과 절대형이 그것이다.
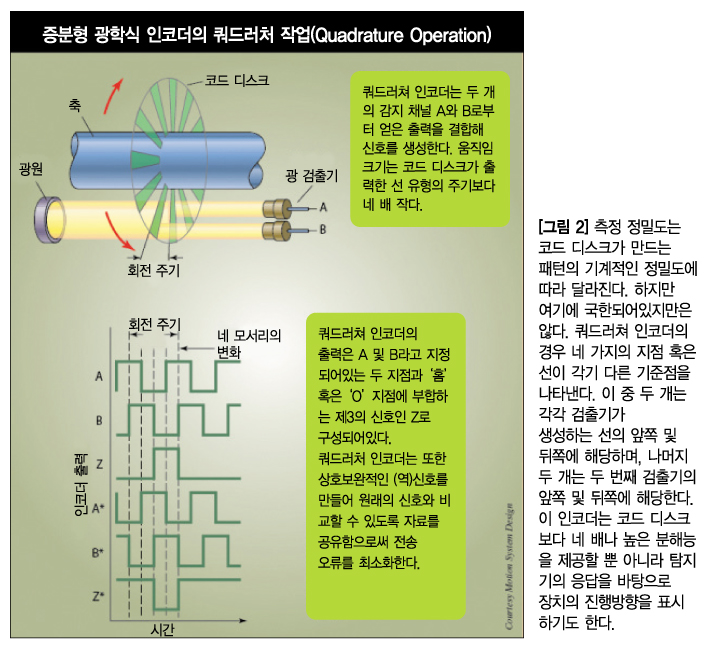
증분형 인코더라는 이름은 그 출력형태에서 유래했다. 증분형 인코더 출력은 두 개의 방형파로 구성되어있으며, 각 방형파는 회전의 증가에 상응한다. 일반적인 작동방법은, 우선 LCD가 볼록렌즈에 직접적으로 빛을 쏜다. 볼록렌즈를 투과한 두 개의 평행한 빛을 이용해 초점을 맞춘다. 다음으로 광선이 격자 다이아프램을 통과하면, 다이아프램은 입력된 빛을 나누어 기존 빛과 90°각도를 이루는 새 광선을 만든다. 디스크의 A 채널 및 B 채널을 통과한 빛은 광 발전 어레이 혹은 광 다이오드 어레이로 이동한다. 디스크는 투명·불투명한 부분으로 이루어져있으므로, 디스크가 회전함에 따라 밝고 어두움을 반복하는 패턴이 생성된다.
광 다이오드 어레이 및 해독 회로가 패턴을 판독 및 처리한다. A 광선 및 B 광선은 별도의 다이오드에 의해 수신되며 서로 직각을 이루는 두 개의 방형파를 만든다. 이 방식을 흔히 직각 위상 출력(Quadrature Output)이라고 일컫는다.
이후 이렇게 생성된 광선을 컨트롤러에 투사한다. 컨트롤러는 말 그대로 신호를 처리할 수 있는 장치로, 펄스 개수와 방향·속도·기타 정보에 대해 알아보고 결정할 수 있다.
증분형 인코더를 통해 제3의 채널을 구성할 수도 있다. 증분형 인코더는 세 번째 채널을 가지고 있다. 이 채널은 단일 세그먼트 슬롯을 포함할 수 있으며, 장치의 0점 지점 혹은 시작점의 기준이 되기도 한다. 여기서 증분 사인파 인코더는 정사각형 직각 위상(Square Quadrature)이 아닌 직교 사인파(사인 및 코사인)를 생성한다. 아크탄젠트 기능은 임의의 분해능 수준을 도출한다.
절대형 인코더는 여러 트랙으로 구성된 디스크와 다수의 검출기로 이루어져있다. 디스크는 그레이 코드 출력을 보장한다. 그레이 코드라는 이름은 벨연구소 물리학자인 프랭크 그레이의 이름에서 유래한다. 그레이 코드는 독특한 2진법을 차용했는데, 일반적인 2진법과 달리 매 비트마다 이어지는 값이 전부 다르다. 따라서 최대 오차범위가 0.5비트에 불과하다(인코더가 이행移行 도중 멈추었을 경우). 절대형 인코더는 또한 장치가 갑자기 멈추었을 경우에도 정보를 사용할 수 있다.
정밀 위치추적(Absolute Tracking) 기능을 사용한 멀티 턴 광학식 인코더는 복합적인 회전에 대응할 수 있는 장비다. 치차장치설계에서 인코더 축은 첫 기어와 맞물려 두 번째 기어를 움직이는 등의 작업을 수행한다. 인코더의 감지 도구 및 전자장치가 각 기어를 추적한다. 인코더는 모든 디스크의 출력을 결합해 샤프트가 최종적으로 회전한 횟수를 센다.
기어가 없는(기어리스) 멀티 턴 인코더 설계는 자기식 형태와 광학식 형태로 만들어진다. 여기에 대해서는 다음 장에서 설명한다.
분해능(흔히 작업자들이 과도하게 설정하고는 하는)은 인코더 축이 한 번 회전하는 과정에서 하나의 채널이 생성하는 완전한 사이클의 수를 나타낸다. 정확도에 영향을 미치는 매개변수로는 각 코드 디스크의 슬롯 개수 혹은 생성되는 패턴 수와 정확도 그리고 장치의 강도 및 안전성 등이 있다.
광 디스크 슬롯 개수는 직접 판독의 분해능을 결정한다. 슬롯이나 선이 너무 많으면 통과하는 빛의 양을 감소시키는 원인이 된다. 슬롯은 디스크 크기에 맞추어 만들어지므로 그 크기가 작기 때문이다. 과다한 슬롯 및 선은 프린징 현상(전자석 내부에서 자속이 공기 중으로 나오면서 휘어지거나 퍼지는 등 왜곡을 일으키는 현상. 편집자 주) 및 누화(근접한 회선에서 다른 회선에 신호 전류가 누설하는 현상. 출처 전기용어사전) 등을 일으키는 주범이다. 카운트가 증가함에 따라 신호 강도가 줄어든다면 이러한 현상을 의심해봄직하다.
전자 보간법(Electric Interpolation)을 통해 직접 판독의 분해능을 높일 수 있다. 전자 보간을 실현하는 일반적인 방법 중 하나는 분압기 회로를 사용해 가공되지 않은 아날로그 신호를 원하는 만큼 세분화하는 것이다. 보간법은 보통 인코더 로직에 포함되어있으며 파악하기 쉽게 만들어졌다. 보간법은 일반적으로 분해능을 20배가량 높여준다.
인코더의 하위 요소
전형적인 인코더 LED 이미터 및 검출기는 보통 디스크 슬롯에 비유되고는 한다. 설계는 일반적으로 검출기와 디스크 사이에 마스크를 설치한다. 감지기에 들어오는 광 펄스의 가장자리 부분을 날카롭게 만들어 감지 정확도를 높이기 위해서다. 마스크는 서로 다른 분해능을 조절할 수도 있다. 하지만 장치 비용이 증가하고, 외부 간섭의 가능성이 높아지며, 감지기로 들어오는 빛의 세기가 약해지는 등의 단점도 있다. 이런 이유 탓에 많은 제조업체가 마스크 없는 인코더를 판매하고 있다. 디스크와 감지기 사이에 더 많은 공간을 확보하고 각 채널 사이의 위상오차 및 가장자리 지터에 대한 저항력을 높이기 위해서다. 더 나은 LED와 감지기 그리고 렌즈 등의 기술 및 장비를 통해 더 높은 저항력을 실현한다.
로터리 광학식 인코더의 코드 디스크(휠이라고도 부른다)는 식각된 금속과 폴리에틸렌 텔레프터레이트 등의 전기 절연재료 그리고 유화 처리를 거친 강화유리 혹은 크롬 도금을 한 유리 등의 재질로 이루어진다. 유리 제품의 경우 뛰어난 모서리 선명도와 결로 현상에 대한 내성 그리고 내구성을 자랑하지만 충격으로 인한 긁힘이나 부서짐에 취약하다. 플라스틱 디스크는 충격에 강하지만 일부 제품의 경우 높은 온도에서 휘거나 뒤틀리는 현상이 일어날 수 있다. 금속 디스크는 충격과 열에 강하고 화학 물질에 대한 내부식성도 뛰어난 편이지만 유리 제품에 비해 정확도가 떨어진다.
광학 기반(Optic Based) 인코더는 그 구조 탓에 독특한 고충을 앓고 있다. 먼지 및 액체 오염의 위협이 그것이다. 외부에서 작동하는 응용사례나 액체와 관련한 응용사례의 경우 가압 고온수·냉각제·윤활제·세정제 등 다양한 액체에 직접적으로 노출된다.
주변온도의 변화 역시 인코더의 고장률을 높이는 주요 원인이다. 뜨거워진 인코더가 냉각하는 과정에서 인코더 내부온도와 주변온도 사이에 차이가 발생해 주변 공기가 인코더 내부로 유입될 수 있다. 인코더 내부온도가 떨어지면 내부에 습기가 차 코드 디스크와 인쇄회로기판 그리고 배선 등에 이슬이 맺힐 위험이 있다. 제품 오작동의 주범이므로 주의해야 한다.
씰링(밀봉)을 견고하게 처리하지 않으면 모래·염분·작은 나무·먼지조각 등이 인코더에 들어갈 위험이 있다. 이 또한 처리과정 진행을 방해하고 성능을 저하시킨다.
로터리 자기식 인코더
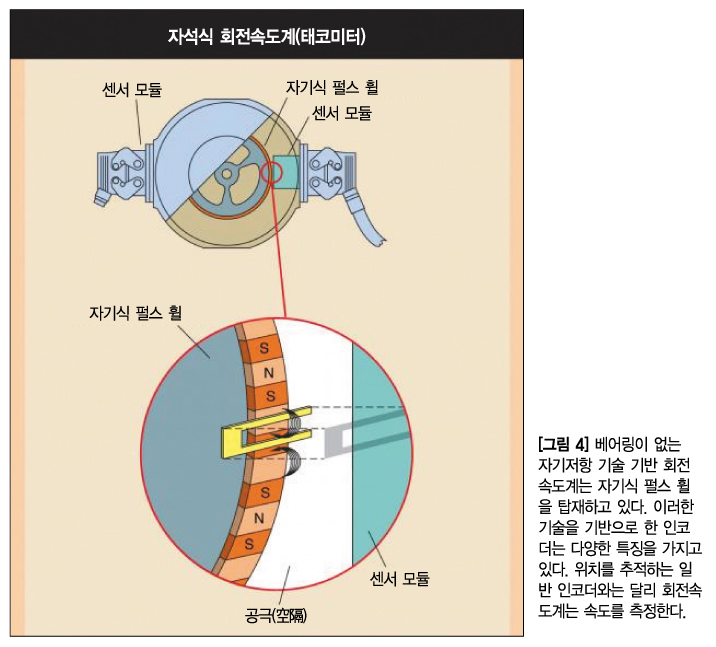
자기식 인코더는 충격 혹은 진동이 심한 환경이나 온도가 높은 곳에서도 안정적으로 작동한다. 또한 먼지 등의 외부 환경에도 강하다. 자성을 띠지 않는 물질이라면 성능에 영향을 미치지 않는 것. 단, 이와 반대로 자성을 띤 잔해물이 자기식 인코더 내부에 유입되면 성능 저하를 일으킨다.
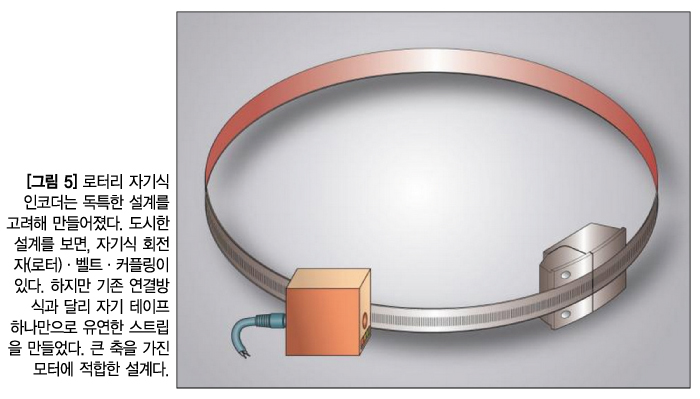
이러한 특징 덕에 로터리 자기식 인코더를 광학식 인코더 대용으로 사용하기도 한다. 회전 코드 로터나 코드 디스크 혹은 밴드 등에 수동적인 자기저항이나 자화 스트립(Magnetized Strip)이 발생하면 홀 효과 센서 혹은 자기저항 센서(MR 센서라고도 한다)가 이를 감지한다. 이는 모터의 속도와 위치정확도 등에 영향을 미치며, 응용사례의 적합성을 좌우하는 요소다.
로터리 자기식 인코더는 크기가 작고 저렴해 여러 응용사례에 쓰이고 있다. 자동차의 잠금 방지 브레이크 시스템(Anti-Lock Brake System, ABS)이나 산업자동화 및 의료장비 등 모션컨트롤 작업을 요하는 정교하고 복잡한 장치에 쓰이고 있다. 로터리 자기식 인코더에는 증분형·절대형, 비접촉식·베어링식, 회전식 장치와 인코더 몸체가 서로 분리되어있는 형태 등 여러 종류가 있다.
대부분의 홀 효과 자기식 인코더는 휠을 사용한다. 모터 축에 휠을 부착함으로써 모터 축을 추적할 수 있다. 또한 휠 주변에 N극과 S극을 갖추어 자화되어있는 것도 특징이다. 휠은 사출 성형된 페라이트에 양극 배열을 결합해 만드는 것이 일반적이다.
이해를 돕기 위해 15㎜ 인코더가 있다고 상정하자. 이 인코더는 직경 7.6㎜의 휠을 내장하고 있으며, 고정 기구를 사용해 32극(N극 16, S극 16)의 자화 처리를 실현했다. 이 기구의 크기는 일반적으로 장치가 내장하고 있는 극의 개수에 따라 달라진다. 32극 모터의 극간격은 약 0.75㎜이다. 이는 고정 기구가 처리 및 제어할 수 있는 가장 작은 크기라고 할 수 있다.
자석 디스크 및 각각 120°씩 전기적으로 떨어진 3개의 디지털 홀 효과 센서를 탑재한 회로 사용을 고려할 수 있다. 이 회로는 휠로부터 통신 신호를 받아들이는 역할을 한다. 회로에 탑재한 홀 효과 센서는 장치가 N극과 S극을 지나갈 때 스위치를 켠다.
홀 효과 인코더는 보통 히스테리시스(이력履歷 현상을 의미함. 편집자 주) 로 인해 출력 특징이 바뀐다. 회전하는 인코더 휠이 생성한 자기장이 한계점을 극복하기에 충분한 자속 밀도에 다다르면 상태가 바뀌는 것. 마찬가지로, 자기장의 자속 밀도가 한계점 아래로 떨어지면 이전 상태로 되돌아간다. 결과적으로 32극 인코더 휠을 탑재한 홀 센서는 매 회전 당 16개의 펄스를 생성한다.
작업에 외부 장치의 이점을 얻을 수 있는 것은 보통 크기의 인코더만이 아니다. 일부 소형·단일 자석의 시스템 온 칩(여러 소자를 한 칩에 집적한 설계를 뜻함. 역자 주) 설계에도 필드 감지 기능을 가진 홀 요소들은 물론, 절대형·증분형·펄스폭을 변조할 수 있는 형태 등 다양한 디지털 출력을 실현하는 디지털 신호처리 기능을 통합했다. 작은 직경의, 서로 다른 극성을 부여하는 자석은 ASIC 위에서 회전하게 된다. 후자의 경우 다수의 홀 효과 센서를 포함하고 있다. 홀 효과 센서는 회전하는 자석의 자속 변화를 감지하고 이에 따른 전압을 생성한다.
하지만 오늘날에는 소형·고성능 인코더 등에서 더욱 높은 분해능에 대한 필요성이 높아지고 있다. 이때 자기저항 재질로 만들어진 인코더를 사용함으로써 요구사항을 충족할 수 있다. 자기저항 재질을 통해 포화 자기장의 저항을 약 1.6%가량 낮춘다.
자기저항 센서는 홀 효과 센서와는 다른 장치다. 자기저항 센서는 홀 효과와 비교했을 때 두 가지의 중요한 차이점이 있다. 첫째는 센서의 포화 자기장(Saturating Field)이 0.003에서 0.005T 가량의 범위를 보이며, 디지털 홀 센서와 비교했을 때 스위칭 필드의 규모가 작다는 점이다. 이는 자기저항소자에 민감한 측정 장비를 실현한다. 둘째는 저항의 변화가 자기장의 극성과 별도로 일어나며, 따라서 32극 휠이 매 회전 당 32개의 펄스를 생성한다는 점이다. 기존 센서 대비 2배의 분해능을 자랑하는 셈이다.
자기저항 센서는 여러 개의 얇은 니켈 철 퍼멀로이 스트립을 포함하고 있다. 스트립은 폭이 두께보다 더 크다. 센서는 인코더의 자기 트랙 위에 위치하며, 스트립은 휠 축에 평행하게 놓인다.
지금까지는 홀 효과 및 자기저항 유형에만 초점을 맞추었다. 하지만 로터리 자기식 인코더 유형은 이 외에도 다양하다. 유도 인코더(Inductive Encoder) 역시 일반적으로 사용되고 있는 유형 중 하나다.
유도 인코더는 하나 이상의 코일에서 전류가 흐르면서 생기는 저항에 따른 반동(즉, 반작용)을 추적함으로써 작동한다. 연철 혹은 페라이트 등의 재질은 고온에 민감한 특징 탓에 문제를 일으킬 소지가 있다. 외부 자기장은 재질의 투자율(자기장의 영향을 받아 자화할 때에 생기는 자기력선속밀도와 진공 중에서 나타나는 자기장 세기의 비. 자기유도용량, 자기투과율이라고도 한다. 출처 두산백과)에 대해 질문을 던진다. 일부 재질의 경우 투자율이 더 큰 신호강도를 받아들이지 못하는 수준(이를 새추레이션 포인트라 한다) 미만으로 떨어질 위험이 있는 것. 대안 중 하나로는 철이 없는 유도 인코더를 사용하는 것이 있다.
자기저항 센서의 채널은 두 개의 스트립으로 구성되어있다. 각 스트립마다 극 피치가 반 개씩 들어있다. 각 스트립은 센서에 달린 두 개의 출력 전압과 연결된다. 두 개의 센서 스트립을 통해 인코더 휠이 한 극만큼 회전하면 출력 전압이 한 번의 회전을 완료하고, 5V DC 전원공급을 통해 40㎷의 피크 투 피크 신호를 생성한다.
인코더 베어링 및 장착 옵션
대부분의(물론 전부는 아니다) 광학식 및 자기식 인코더는 베어링의 지원을 받는다. 베어링을 활용하면 인코더 하우징(센서 전자장치를 감싸고 있으며, 몇몇 경우 코드 디스크 혹은 휠을 보호하기도 한다)은 고정시킨 채 축만 회전할 수 있다. 하지만 베어링은 기본적으로 높은 하중을 지지하기 위해 만들어진 물건이 아니며, 따라서 충격이나 진동, 전체 시스템 부하 혹은 정렬 불량 등에 최대한 노출되지 않도록 해야 한다.
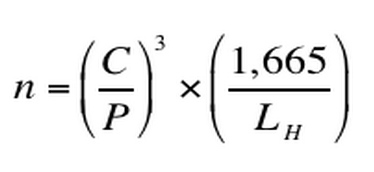
베어링 부하와 수명 사이의 관계는 다음과 같은 공식으로 설명할 수 있다.
위 식에서 n은 베어링 수명 및 회전을, C는 동적 용량(제조업체의 자료 기준)을, P는 베어링 부하를 lb 단위로 나타낸 것이며, LH는 베어링의 설계수명을 시간 단위로 나타낸 것이다. 베어링 수명은 부하의 세제곱과 반비례한다.
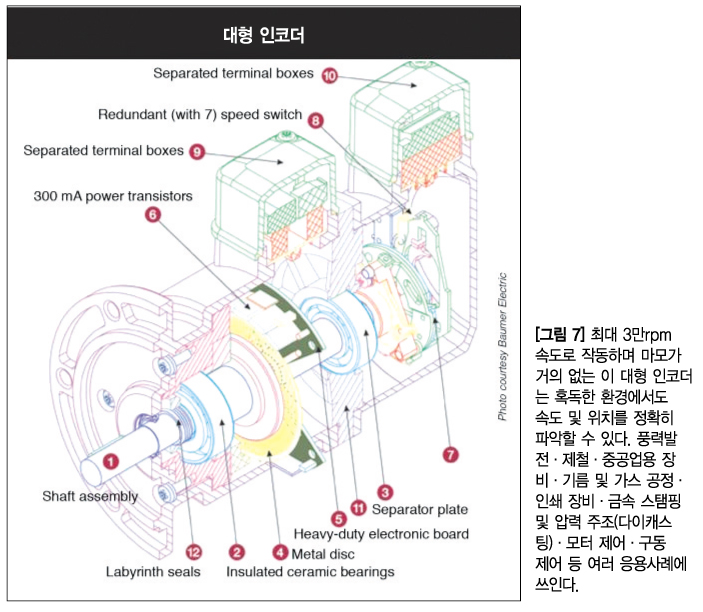
베어링을 조립할 때에는 어느 정도의 내성을 갖게끔 조립할 수 있다. 이를 통해 최대 3만rpm에 해당하는 고속 작동을 보장한다. 하지만 인코더와 모터 축 사이가 과도하게 연결되어있고(Hard-mounted) 인코더 하우징이 베이스 플레이트와 강하게 연결되어있다면 베어링에 수백 파운드만큼의 측면 부하가 일어날 수 있다.
표준형 인코더는 전용 축 및 베어링을 포함하고 있을 수 있다. 값이 저렴하거나 크기가 매우 작은 인코더는 주로 접착제 등을 통해 베어링을 축 허브에 안전하게 고정시킨다. 하지만 이 경우 진동으로 인해 오류가 일어날 우려가 있다. 일반적으로는 벨트나 기어 트레인 혹은 커플링 등을 통해 인코더 축과 모터 축을 연결한다. 후자의 경우 인코더와 회전 구동축 센터 사이의 완벽한 조정 및 정렬이 불가능하다. 이를 극복하고자 플렉서블 커플링을 사용하기도 한다. 제조업체는 적절한 설치에 대한 자세한 지침을 제공한다.
반면 할로 보어(중공축Hollow Shaft이라고도 일컫는다) 인코더는 유연한 마운트를 통해 모터 축에 직접 연결할 수 있다. 보어와 축 사이의 적절한 설치와 더불어 유연한 마운트 방식을 활용하면 장치 정확도를 유지하고 인코더 베어링의 수명을 늘릴 수 있다. 표준형 인코더 및 중공축 인코더 모두 견고하고 튼튼한 구조를 갖추고 있다.
제조업체마다 ‘모듈형’ 및 ‘킷’ 등 서로 다른 용어를 사용하고 있다. 이는 일련의 부품을 사용해 디스크나 휠을 축에 고정해 판매하는 것을 의미한다. 모터 샤프트 런아웃 및 축방향 움직임에 대한 민감도가 문제를 일으킬 수 있다. 또한 광학식 인코더에서는 일부 작업에서 디스크와 광학장비가 서로 맞부딪혀 충돌을 일으킬 수 있다. 몇몇 모듈러 인코더는 모터 축에 자기보호장치를 장착하고 있기도 하다.
제조업체들은 최근 몇 년 동안 인코더 베어링 크기를 키워오고 있다. 더 많은 부하를 견디고 장치 수명을 늘리기 위함이다. 경우에 따라 센서 및 전자장치들을 둘러싼 견고한 하우징의 대변(對邊)에 베어링을 설치하기도 한다. 부피가 큰 설계에도 사용하기 위함이다. 견고한 샤프트 사전 설치 상태를 통해 큰 방사상 부하 및 축 방향 부하도 견뎌낼 수 있는 것은 물론 500g의 충격에도 견딜 수 있으며 -40~100℃의 작동범위를 자랑한다.
하우징과 인코더 축이 분리 되어있는 세라믹 볼 베어링은 AC 모터 및 발전기로부터 만들어지는 축전류의 발생 및 증가를 방지한다. 이는 특히 VFD 설계에 영향을 미친다.
이와 달리 차단이 해제된 축 표류전류 및 암 전류(광전 소자에서 입사광이 없는 상태에서도 출력 회로를 흐르는 전류를 말한다. 출처 자동차 용어사전)는 접지 상태인 인코더 하우징을 통해 지면으로 흐름으로써 베어링 롤러 및 선로가 방전가공(및 실패)를 일으키는 원인으로 작용한다.
그 유명한 ABEC7 베어링조차 22아크초 가량의 롤링 오차를 가지고 있음에 주의해야 한다. 인코더의 분해능은 매 회전마다 5만 카운트를 상회하며, 이러한 베어링 노이즈를 위치 오차의 형태로 반영한다. 베어링을 구성하는 각 요소들 사이의 열적 부조화 또한 성능 및 예상수명을 줄이는 원인이다.
일부 튼튼한 인코더는 다이캐스트 하우징을 채택한다. 다이캐스트 하우징은 베어링 사이에 놓인 축 길이를 늘일 수 있으며, 여타 인코더 혹은 원심스위치 등을 설치할 수 있다. 원심스위치란, 보조권선을 병렬로 전기각 90°의 위치로 설치하며, 시동 후 동기속도의 75∼80%에 도달하면 자동적으로 원심력으로 작동해 정상운전이 되는 스위치를 말한다(출처 농촌진흥청). 이 시스템은 첫 번째 시스템과 전자적으로 독립되어있으며, 안전 측면을 강조해야 하는 응용사례에서 빛을 발한다.
인코더가 작업량이 많은 쪽을 향해 돌출되어있는 경우 장치에 손상을 입을 수도 있다. 망치 혹은 지게차 등에 의해 손상을 입을 수 있는 것. 반대로 바닥을 향하게 두면 원활한 움직임을 보장한다. 또한 케이지 혹은 상자 등의 장비를 장착함으로써 인코더를 보호할 수 있다.
인코더 보호(씰링)
인코더 내부 설계에 베어링을 통합할 때, 완벽하게 밀봉된 인코더를 구현하는 것은 불가능하다. 베어링이 인코더 내부에서 축을 따라 이동할 수 있어야 하기 때문이다.
고무 혹은 플라스틱 립 씰을 탑재한 높은 IP 등급의 베어링조차 회전속도와 설계 그리고 설치 위치 등 모든 면에서 완벽할 수는 없다. 씰은 마모와 노화 그리고 자외선 복사에 의한 열화 등의 위험에 노출되어있음을 명심해야 한다.
인코더 베어링은 개방(최소한의 보호만을 적용)·차폐(적당한 정도의 보호)·봉인(Sealed, 최대 보호) 등 다양한 등급으로 보호할 수 있다.
씰 처리가 된 인코더 중 가장 선호하지 않는 형태는 샤프트 업 인코더 형태다(자기식 유형에서 특히 그렇다). 이는 상대적으로 간격이 좁은 씰 인코더(IP 67 등급)를 다양한 방면에서 활용할 수 있음을 시사한다. 액체에 잠겨있는 응용사례나 12bar 압력으로 분당 10ℓ씩 압력 세척(Pressure Wash, 페인팅 등의 작업을 하기 전에 낡은 페인트나 곰팡이 등을 제거하는 작업을 의미한다. 편집자 주)을 가하는 응용사례 등에도 사용할 수 있다.
미로형 씰(래비린드 씰이라고도 한다)은 역 리드 나선홈 구조로 되어있어 장치 내부로 액체 및 먼지가 유입되는 것을 방지한다. 하지만 축봉 장치(Shaft Seal)가 발열의 원인이 되기도 한다. 설계자들은 제조업체의 도움을 받아 각 씰의 한계치를 확인해야 한다.
분해능과 정확한 출력을 동시에
인코더의 분해능에 대해 명시 및 지정하고자 할 때에는 오류 분석을 고려해봄직하다. 오류 분석은 인코더를 선택하기 위한 기준 중 하나로 쓰인다. 장치가 가지고 있는 최대 오차보다 2배 내지 4배가량 높은 분해능의 인코더를 선택하는 것이 바람직하다.
분해능은 대역폭과 관계가 있다.
위 식에서 F는 주파수를 의미하며 Hz 단위로 나타낸다. N은 속도를 rpm 단위로 표현한다. R은 분해능으로, 회전 당 카운트 수로 표시한다. 시스템 작동 속도는 각 요소들 사이의 균형에 따라 달라진다. 장치의 처리 및 전송량과 폐기율(Srcap Rates) 사이의 균형을 예로 들 수 있다. 장치가 가지고 있는 고유 오차 또한 분해능을 떨어트리는 요인이다.
제조업체가 제공한 도표 혹은 수치들을 활용해 장치의 작동 대역폭을 계산할 수 있다. 출력 드라이버의 종류(회선구동기·개방 컬렉터·푸시 풀 복합형 등)·케이블 종류 및 길이·컨트롤러 종단의 단자 부하(端子負荷) 등이 작동 대역폭에 영향을 미친다. 개방 컬렉터는 높은 임피던스로 인해 대역폭 측면에서 더 많은 제한을 받게 된다. 최대 50㎑ 범위에서 최대 50피트(약 15.24m) 길이의 케이블을 사용할 수 있다. 가장 저렴한 출력 방식이다.
풀업 저항(회로의 입출력 단자와 고전위 사이에 접속되어 있는 저항. 출처 전자용어사전)은 사용자가 직접 마련하거나 인코더 내부에 설치할 수도, 두 형태 모두를 활용할 수도 있다. 장치를 배치할 때에는 컨트롤러 혹은 인코더의 영향을 받는다. 인코더를 공급 전압과 다른 전압으로 작동시켜야 하는 경우 특히 그렇다.
높은 분해능이 높은 시스템 정확도로 직결되지는 않는다. 하지만 너무 낮은 분해능은 시스템이 속도나 위치를 정밀하게 제어하는 능력에 제한을 줄 수 있다. 직각 위상을 활용한 증분형 인코더는 방향 정보를 규정 및 제공할 뿐 아니라, 적절한 수신 장치와 결합할 경우 분해능을 최대 4배까지 높일 수 있다.
인코더가 출력하는 자료는 이진수 형태로 컨트롤러로 전송된다. 아날로그 전압 혹은 전류 형식으로, 프로피넷·이더넷 파워링크·이더넷/IP·모드버스·디바이스넷·프로피버스·CANopen·여타 네트워크 등을 통해 자료를 전송할 수 있다. 자기식 인코더에는 표준 직렬 출력(Standard Serial Output, SSO)을 주로 활용하고 있다. 자료를 송수신하는 동안에도 지속적으로 동기화할 수 있는 것이 장점이다.
다른 전송방식 선택사항으로는 동기식 직렬 인터페이스(Synchronous Serial Interface, SSI)가 있다. 이 방식은 디지털 점대점 접속을 허용한다. 유럽에서 일반적으로 사용하고 있는 동기식 직렬 인터페이스는 1.5㎒의 단방향 통신을 보장한다. 이 방식은 또한 여섯 개의 철제 케이블을 사용하는 것이 특징인데, 두 개는 클럭 데이터를 인코더로 전송하고, 두 개는 인코더에서 데이터를 수신하며, 마지막 두 개는 전력을 공급한다. 마지막으로 양방향 동기식 직렬 인터페이스(Bidirectional Synchronous Serial interface, BiSS)는 버스 혹은 점대점 접속을 실현하는 개방형 프로토콜로, 컨트롤러가 요청할 때마다 인코더의 위치 데이터를 전송하고, 작동이 멈추어도 빠르게 복구할 수 있으며, 작업을 방해하지 않고 실시간으로 인코더 식별정보와 가속도 그리고 온도 등의 자료를 전송할 수 있다.
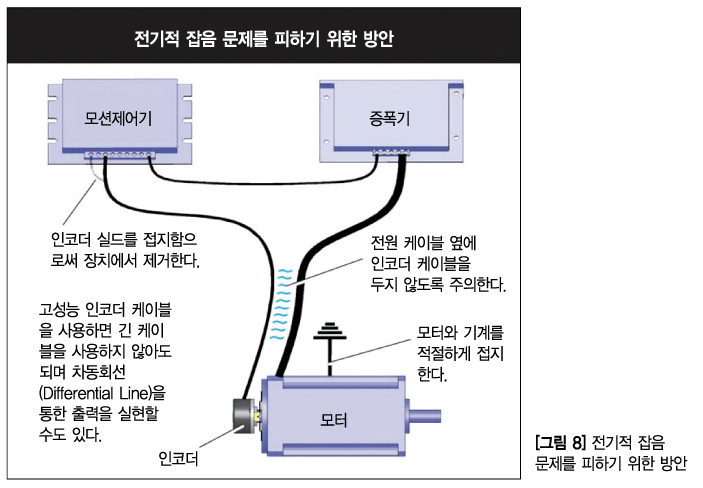
장치의 신뢰성을 높이기 위해서는 인코더 전원 공급을 규제 및 조절해야 한다. 다른 장치의 전원 선을 인코더 선과 떨어트려두어야 한다. 또 일부에서는 특수하게 코팅된 단자함을 사용하기도 한다. 전자기 적합성 필드를 활용해 신호 출력 불이행 등의 오류를 방지하기 위해서다. 이러한 단자함을 사용한 인코더는 케이블을 180。 회전시켜 개구를 인코더의 좌측 혹은 우측으로 향할 수 있다. 이를 통해 한결 손쉬운 설치를 보장한다.
효율적인 차폐를 위해 차폐 연선을 갖추고 이를 각 장치에 적절하게 연결해야 한다. 이 경우 스타 구성(하나의 입출력 채널에 대해 한 대의 입출력 제어 장치만이 접속되는 방식. 출처 컴퓨터인터넷IT용어대사전)을 활용하는 것이 바람직하다.