협업 로봇이 공장을 변화시키고 있다. 모션 기술과 감지 기술의 발전에 힘입어 안전을 담보하면서 기계와 인간이 함께 협력할 수 있게 된 것이다. 이는 높은 강도와 반복성을 지닌 기계의 강점을 인간의 유연성에 결합하여 더 효율적인 생산이 가능하게 됐음을 의미한다.
로봇과 인간의 협업에는 한 가지 전제가 필요하다. 바로 안전이다. 상해 위험을 줄이면서 동일한 작업 공간을 공유할 수 있게 해주는 안전 기술이 필수적인 것이다. 이를 위해 로봇산업협회를 비롯한 다양한 기관에서 안전 표준을 마련하여 로봇과 인간의 협력으로 생산성을 높이면서 동시에 안전성까지 확보하도록 하고 있다.
표준 ANSI/RIA R15.06-2012과 ISO 10218에서는 ‘협업 로봇’을 ‘인간과 동일한 작업 공간을 공유하면서 자동으로 작동되는 로봇 시스템’으로 정의한다. 로봇과 인간의 협업 형태는 다음의 네 가지 유형으로 나눌 수 있다.
Safety-rated monitored stop : 안전 제어 시스템의 센서는 사람의 존재를 감지하고 사람이 너무 가까워지면 즉시 로봇을 정지시켜야 한다. 이 기능은 사람과 로봇의 작업 영역이 겹치거나 가까울 때 필요하다. 작업자는 안전 정지 상태에 있는 로봇에 부품을 로드할 수 있는데, 이 때 기계가 로봇과 독립적으로 계속 작동할 수 있어 생산성을 높을 수 있다.
Hand-guiding operation : 안전 등급 모니터링보다 덜 일반적인 방법으로 작업자가 로봇을 수동으로 제어하거나 위치를 변경하는 것이다. 일반적으로 빠른 속도가 요구되는 작업에서 작업자가 로봇 암과 직접 접촉하여 수동으로 로봇을 제어한다.
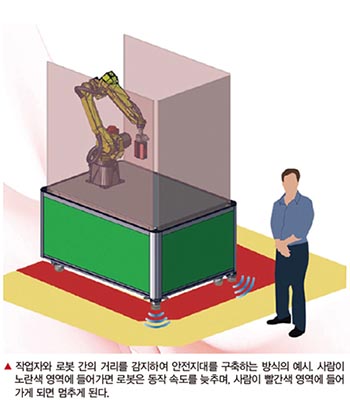
Speed and separation monitoring : 이 방법은 작업자와 로봇이 서로 충분한 거리를 유지하면서 동일한 공간에서 작업할 수 있도록 한다. 사람이 로봇에 너무 가까이 다가서게 되면 센서가 로봇을 감속시키거나 정지시킨다. 특히 새로운 안전 센서 기술로 인해 적용이 확산되고 있다.
Power and force limiting : 실수로 로봇과 인간이 접촉했을 때 로봇이 힘이나 토크를 줄여 사람이 다치지 않도록 하는 방법이다. 이를 위해서는 인체의 여러 부분에서 힘과 통증 역치간의 관계를 이해해야 한다. 표준 ISO/TS 15066은 인체의 각 부분에 대한 최대 힘과 압력 수준의 목록을 포함하여 힘의 한계를 결정하는데 도움을 주며, 로봇과 접촉할 수 있는 인체의 각 부분에 대한 위험 평가를 수행하는 방법에 대한 지침을 제공하고 있다.
무엇보다 협업 로봇 응용 프로그램을 설계할 때 기능 안전 수명주기를 따르는 것이 중요하다. ISO 12100과 ANSI B11:0에서 안전 라이프 사이클을 정의하고 위험 평가를 수행하는 첫 단계는 기능 사양을 정의하고, 적절한 보호 기능을 사용하는 것이다. 그 이후 검증과 유효성 검사를 수행해야 한다.
ISO/TS 15066은 ISO 10218-1과 ISO 10218-2를 보완해 공동 작업 공간 설계 및 협업 로봇 애플리케이션의 위험 평가 수행 방법에 대한 지침을 제공한다. 또 RIA TR R15.306은 업무에 기반한 위험 평가를 수행하기 위한 권장 방법론을 제공하여 표준 요구 사항을 충족할 수 있게 한다.
