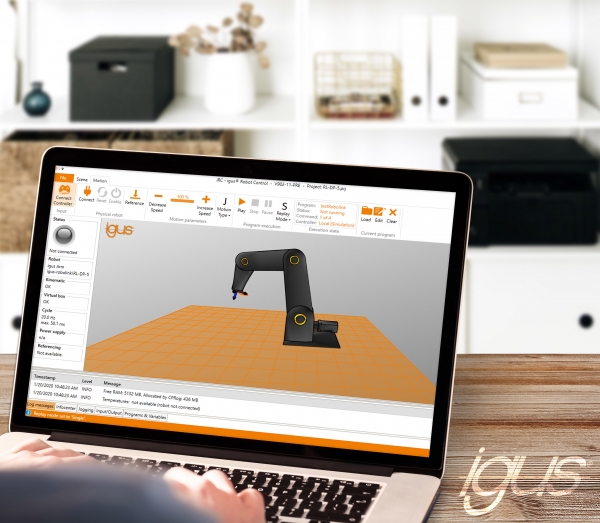
이구스가 로봇 제어 소프트웨어를 개발했다. 로봇에 들어가는 각 부품들을 온라인에서 조합하고, 디지털 트윈으로 동작을 시뮬레이션할 수 있어 로봇을 구매하기 전이라도 적합한 솔루션을 프로그래밍할 수 있다는 게 특징이다.
이 시스템이 가진 온라인 툴의 티치 인(teach-in) 기능은 로봇을 연결하지 않아도 가상으로 로봇의 모션을 설계하고 제어할 수 있도록 돕는데, 3D 인터페이스에서 로봇을 원하는 위치로 이동시켜 원하는 모션을 시뮬레이션하는 기능을 지원하기 때문이다.
가상 시뮬레이션에서는 물론 로봇이 기계와 충돌하는 것을 방지하기 위해 가상의 박스를 놓을 수 있으며, 그리퍼와 같은 구성 요소 추가도 용이하다.
이구스의 자동화 로봇인 LCA(Low Cost Automation)제품군에는 다관절 로봇 암, 델타 로봇, 직동 로봇, 총 세 가지가 있는데, 이구스는 사용자가 자신의 애플리케이션에 가장 적합한 로봇을 미리 테스트 할 수 있도록 현재 자사가 소유한 모든 로봇의 시뮬레이션과 프로그래밍용 소프트웨어를 제공하고 있다.
저작권자 © MSD(Motion System Design) 무단전재 및 재배포 금지
