퍼듀대학교Purdue University의 연구진이 벌새처럼 비행하는 로봇을 발표했다. 특히 이 비행 로봇은 새의 움직임을 단순 모방에 그치지 않고, 인공지능AI을 활용하여 주변 환경에 따라 자연스러운 조류의 움직임을 구현했다.
퍼듀대학교의 연구진이 개발한 벌새 로봇은 먼저 시뮬레이션을 통해 학습을 진행하고, 이후에는 자연의 벌새처럼 스스로 움직이는 방법을 터득하여 행동하게 된다. 또 연구진은 촉각을 부여하여 날개로 주변을 터치, 매핑할 수 있게 했다. 이를 통해 빛이 없는 환경에서의 탐색/구조 등에서 이 로봇을 활용할 수 있게 한다.
연구진에 따르면, 벌새 디자인은 드론의 한계를 돌파하게 한다. 지구상에서 가장 작은 조류인 벌새는 탄력적으로 움직이는 날개를 활용하여 일반적인 공기 역학과는 다른 방식을 비행한다. 이를 통해 기존 드론에서 갖는 소형화에 한계를 극복할 수 있다.
벌새 디자인을 통한 더 작은 비행 로봇의 아이디어는 이번 연구가 최초는 아니다. 독특한 벌새의 운동 역학에 많은 과학자들이 주목하고 있기 때문이다. 2011년 미 국방부 DARPA가 AeroVironment에 의뢰해 벌새 로봇을 개발한 것이 대표적인 사례이다.
퍼듀대학교의 연구진은 AI를 접목하여 기존 벌새 로봇과의 차별화를 꾀했다. 원격 조종 장치로 제어됐던 기존 로봇과 달리 AI를 통해 벌새의 움직임을 사전 학습하고, 이를 바탕으로 사람의 원격 제어 없이도 벌새 로봇이 스스로 비행을 제어할 수 있도록 한 것이다. 이는 파악되지 않은 위험 요소와 변수가 많은 재해 구조 시 벌새 로봇의 활용도록 높이도록 한다.
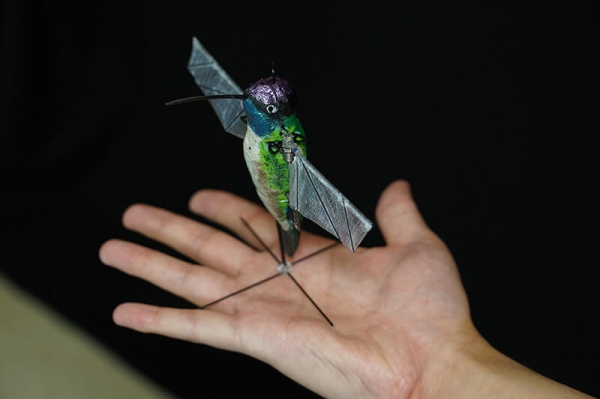
Xinyan Deng 퍼듀대학교 기계공학과 교수의 연구진은 두 가지 초소형 비행 로봇 디자인을 공개했다. 3D 프린팅된 몸체와 탄소 섬유 날개를 지닌 무게 12g의 벌새 로봇과 1g의 곤충 로봇이 그것이다. 무게 1g의 비행 로봇 역시 AI를 통해 학습하여 자연스러운 비행을 실현한다.
한편, 연구진은 현재 이 기술에 대한 시뮬레이션을 깃허브(github.com/purdue-biorobotics/flappy)를 통해 오픈소스로 이용할 수 있도록 공개했다.
