자연에는 주어진 환경을 극복하기 위한 진화의 결과물이 담겨 있다. 천적을 피하기 위해 몸을 숨기고, 사냥을 위해 더 빠르게 움직일 수 있도록 최적화한 결과물들이 자연에 담겨 있는 것이다.
하늘을 날기 위해 새의 커다란 날개를 모방하려는 것에서 초기의 비행기가 시도됐듯 인류는 많은 부분에서 자연을 모방하면서 진화의 과실을 얻으려고 했다. 로봇 분야에서도 이는 마찬가지이다. 자신의 몸보다 수십배의 무게를 지탱하는 곤충의 외골격에서 아이디어를 얻어 인간의 움직임을 보조하는 웨어러블 로봇이 등장하여 무거운 짐을 쉽게 옮기게 하고, 힘든 자세에서의 작업을 수월하게 하는 것은 이를 보여주는 대표적인 사레이다.
SEASHarvard John A. Paulson School of Engineering and Applied Sciences의 연구진이 뱀을 모델로 보다 자유로운 움직임을 구현한 로봇을 개발하고, National Academy of Sciences에 논물을 게재했다. 이 로봇은 일본의 가장 큰 특징은 종이공예 기법 중 하나인 키리가미kirigami 방법으로 개발됐다는 점이다. 키리가미는 접착제를 사용하기 않고, 종이를 잘라서 완성하는 공예 기법으로, 책을 펼치면 궁전이나 사람이 입체적으로 표현되는 입체책이 대표적이다.
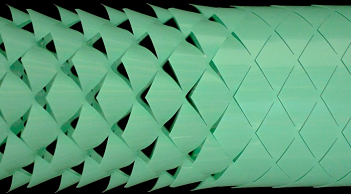
SEAS의 연구진은 키리가미 기법을 사용하여 뱀 가죽처럼 땅을 쥐는 3D 텍스처를 제작하여 로봇 외피로 만들었는데, 이를 통해 로봇은 유연하게 동작하면서 필요 시 마치 뱀 가죽처럼 땅을 쥐면서 튀어오르는 움직임을 구현했다. 연구진이 처음 개발했던 1세대 로봇은 평면 키리가미 시트로 펴졌을 때 균일하게 변형됐지만, 새로운 로봇에는 키리가미 쉘shell 개념을 적용하여 각각의 키리가미 쉘이 프로그래밍에 따라 원하는 때, 원하는 대로 튀어 나오거나 지면을 움켜쥐게 해 로봇이 더 정확하고, 빠르게 움직이도록 한 것이다.
SEAS의 Ahmad Rafsanjani 박사는 “이는 불규칙한 팝업 변형을 가진 키리가미 구조”라며 “이러한 형태의 변형 제어를 통해 반응성 표면과 스마트 스킨의 질감·형태 변화에 대한 온 디맨드 변화를 디자인할 수 있다”고 말했다.
