자동화의 확산에 따라 로봇 시장이 가파른 성장가도를 달리고 있다. 특히 협동로봇 등 인간과 같은 공간에서 활동하는 새로운 형태의 로봇이 등장하여 인기를 모으고 있다. 이에 발맞춰 로봇을 구동하는 액추에이터에서도 새로운 혁신이 제기되고 있다. 제네시스로보틱스가 직접 구동 방식의 이점을 고찰했다.

오늘날 로보틱스 분야는 가장 뜨거운 분야 중 하나다. 기업의 당면 문제 해결을 위해 다양한 로봇 개발이 빠르게 진행되고 있는 가운데 최근 빠르게 향상되고 있는 인공지능AI : Artificial Intelligence과 기계학습Machine Learning을 통하여 더욱 스마트하게 되면서 산업 분야의 활용이 확대되고 있다.
그런데 로보틱스의 진화에서 중요 구성요소 중 하나인 액추에이터 부분은 간과되고 있다. 액추에이터는 로봇의 움직임을 구현하는 핵심 요소로 로봇의 효과적인 활용을 위해서는 액추에이터의 혁신에 대해서도 주의를 기울여야 한다.
힘의 효과적인 활용
액츄에이터는 로봇과 같은 기계의 조인트와 축에서 움직임과 강도를 제공하는 구성 요소이다. 기계 작동은 전원과 제어 신호로 이뤄지지만, 이때 모터의 출력을 사용 가능한 속도와 토크로 변환시키는 것이 더 효율적이다.
자전거의 기어를 생각해 보자. 자전거의 바퀴를 직접 움직이면 많은 힘이 필요하며, 가파른 언덕길에서는 다리의 힘이 부족하여 오를 수 없을지 모른다. 직접 자전거 바퀴를 직접 구동하는 대신 기어를 활용하게 되면, 휠을 구동하는 데 필요한 토크를 쉽게 얻어 피로를 줄이면서 자전거를 운행할 수 있게 된다.
기존 모터/기어박스 조합이 함께 작동하는 로봇 액추에이터의 경우에도 마찬가지이다. 모터의 낮은 토크 출력을 변환하여 사용 가능한 속도로 로봇 암에서 더 강력한 동작을 달성하기 위해 기어박스를 활용하게 된다.
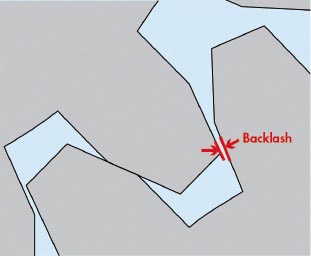
하지만 더 높은 토크를 위해 더 높은 비율, 혹은 더 많은 기어단을 사용하게 되면 더 많은 백래시를 갖게 된다. 기어 시스템이 복잡할수록 변속기 시스템의 백래시Backlash가 커질 수밖에 없기 때문이다.
백래시는 로봇의 정밀도에 영향을 줄 뿐 아니라 안전에도 영향을 줄 수 있는 위험 요소이다. 백래시는 시스템의 느슨한 부분으로 기어의 유격이라고 말할 수 있다. 예컨대 자동차의 시동이 꺼져있을 때 스티어링 휠을 좌우로 움직일 수 있는데 이것이 시스템의 유격이다. 자동차의 시동이 꺼져 있을 때 스티어링 휠을 움직이면, 스티어링 휠은 작게 이동하지만 타이어는 전혀 움직이지 않음을 알 수 있다. 이것이 바로 스티어링 휠의 유격이다.
“백래시를 없애라”
기어 시스템에서 백래쉬의 제거는 매우 어려우며, 다단계 기어 박스에서는 거의 불가능한 작업이다. 백래시를 줄이기 위해 기어는 매우 빡빡한 피팅과 공차로 제조되어야 하는데, 이는 값비싼 작업이다. 또한 허용 오차가 크면 마찰이 높아지며, 이에 기어가 토크 범위를 초과하지 않도록 유지하는 메커니즘이 요구된다.
스트레인 웨이브 기어Strain Wave Gear와 같은 유연한 기어 시스템은 기어 박스에 느슨함을 견딜 수 있는 유연한 구성요소를 갖고 있어 백래시를 없애는 방법을 제공하기도 한다. 하지만 불행하게도 이러한 백래시 제거는 잠재적인 취약성을 초래할 수 있으며, 장치가 역 방향으로 동작하는 것을 어렵게 만들 수 있다.
따라서 일반적으로 기어드 액추에이터는 저속 응용 분야에 적합하다. 효율이 가장 좋은 지점Sweet Spot을 찾을 수 있기 때문이다. 또 이는 상대적으로 낮은 토크(약한) 모터를 사용할 수 있게 하여 모터 구입 비용 절감에도 일조한다.
직접 구동으로 더 정밀하게
직접 구동 액추에이터Direct-Drive Actuator는 기어 박스를 제거한 것으로, 이러한 액추에이터의 모터는 사용 가능한 속도에서도 충분한 기본 토크를 생성할 수 있어야 한다. 즉 더 크고 강력한 모터가 필요하다.
하지만 직접 구동 방식은 기어가 배제되어 백래시에서 자유롭게 된다. 특히 사람이 움직이고 배치해야하는 협업로봇Cobot 분야에서 큰 이점을 지니며, 내충격성도 뛰어나 보행 시 충격으로 인해 기어가 손상될 수있는 외골격이나 보행 로봇에서도 직접 구동 방식이 더 적합하다고 평가된다.
나아가 기어 박스의 제거는 관성에서도 더 자유로워짐을 의미한다. 이는 로봇과 기계의 안전성 측면에서 큰 이점이다. 자동차가 언덕을 내려올 때 관성으로 인해 빨리 멈추지 못하듯 기어박스에서도 이와 비슷한 현상이 발생한다. 4000RPM의 100:1 기어 박스에서 작동하는 모터의 경우 즉각적인 정지가 불가능하며, 기어박스는 속도를 늦추기 위해서 시간을 필요로 한다.
로봇 솔루션의 구현에서 이는 큰 이점이다. 기어드 시스템의 백래시는 유격을 보정하여 정밀도를 확보하기 위한 복잡한 프로그래밍이 요구된다. 이는 복잡하고 까다로운 작업일 뿐 아니라 지속적으로 재교정되어야 한다. 여기에 기어가 손상되어 교체하거나 윤활해야 하는 유지보수 비용이 추가된다.
50% 이상의 비용 절감
직접 구동의 또다른 이점은 비용이다. 모터와 기어박스의 조합이 아닌 기어박스를 제거한 단순한 모터로, 유지보수를 비롯한 작동 비용을 낮출 수 있다. 이에 로봇을 변곡점에 가깝게 만들고 즉각적인 비용 절감 효과를 얻을 수 있게 한다.
기어 없이도 로봇이 작동할 수 있도록 직접 구동 액추에이터에는 새로운 속성이 필요하다. 직접 구동 액추에이터를 위해 요구되는 주요 조건은 다음과 같다.
●증폭된 자력 : 표준 영구 자석의 유효한 힘을 증가시키는 독특한 구성
●구조적 자기 시너지 : 증폭된 자력을 통해 생성된 엄청난 자력이 전통적인 모터 구조를 혁신한다. 이 새로운 수준의 자기 성능은 큰 힘을 견딜만큼 견고하면서 동시에 높은 토크 대 중량 비율을 제공할 수 있는 가벼운 기계적 구조가 필요하다.
●열역학 이상 현상 : 열은 전자기 장치의 제한 요소이다. 열 발산을 위한 얇고 가벼운 구조를 통하여 액추에이터가 기존의 모터보다 훨씬 높은 전력 레벨에서 작동할 수 있게 해야 한다.
기어/모터 방식과 직접 구동 방식의 가장 큰 차이점은 로봇의 비용과 성능에 있다. 라이브드라이브와 직접 구동 액추에이터는 기어부를 제거함으로써 경량화를 실현하고, 총 부품 수를 줄여 설계의 단순화와 유지보수 간소화를 실현한다. 이를 통하여 기존의 기어/모터 기반의 액추에이터와 비교해 50% 이상의 비용 절감을 꾀할 수 있다.
또한 기어의 제거로 백래시가 사라져 정밀도를 쉽게 높일 수 있다. 직접 구동 솔루션은 높은 정확도와 정밀도, 비틀림 강성을 제공할 수 있다. 더불어 액추에이터를 역 구동 시 기어박스의 속도 감소 특성이 없어 훨씬 더 빠른 속도를 구현한다.
