비전시스템은 제품의 품질을 개선하거나 생산라인을 자동화하고자 하는 이들이 눈여겨보는 시스템 중 하나다. 하지만 응용사례 및 요구사항에 부합하는 비전시스템을 찾기란 쉽지 않다. 이미 가지고 있는 비전시스템을 요구사항에 최적화하는 일은 더욱 어렵다. 머신비전의 종류와 요소에 대한 지식을 갖추는 것이 비전시스템의 선택과 통합에 중요한 역할을 한다. 비전시스템을 구축할 때 비용을 낮추고 검사 정확도를 높일 수 있는 방법을 알아본다.
비전시스템의 개념이 쉬이 이해되지 않는다면, 사람의 ‘눈’을 떠올리면 된다. 비전시스템은 컴퓨터의 눈 역할을 한다. 물체를 식별하고, 검사하며, 이렇게 얻은 정보를 여타 장치(‘머리’ 역할을 하는 컨트롤러 등)와 교환한다. 이를 통해 제품의 생산성을 높이고 일정한 품질의 제품을 만듦으로써 고객을 만족시킬 수 있다.
비전시스템은 어렵고 반복적이며 재미없는 작업을 빠르고 정확하며 일관성 있게 수행한다. 제조공정에서 오류 혹은 편차가 발생하면 이를 즉시 감지 및 전달하고, 제어 설정을 변경할 수 있다. 폐기물을 줄이고 다운 타임(장비가 정지하는 시간. 편집자 주)을 최소화하는 등 상황에 따라 다양한 작업을 수행한다.
검사 작업 외에도 비전시스템을 사용하는 분야는 많다. 예를 들어 부품을 선별해 집적하는(픽 앤 플레이스) 과정에서 로봇을 보호하거나, 부품 혹은 구성요소를 배치하거나, 용접 층이나 면 혹은 액체를 나누는 역할을 하기도 한다.
비전시스템은 필요한 응용사례에 맞추어 다양한 형태와 크기로 구성할 수 있다. 하지만 크기나 모양에 상관없이 핵심적인 구성요소는 동일하다.
모든 비전시스템은 하나 이상의 이미지센서를 가지고 있다. 영상을 획득 및 분석하기 위함이다. 또한 사용자가 정의한 검사 프로그램 혹은 특정 작업을 수행하기 위해 응용사례에 맞는 소프트웨어 혹은 프로세서 등을 탑재하고 있다. 여기에 검사 결과를 알리기 위한 몇 가지의 방법 및 체계를 가지고 있다. 작업자 혹은 관리자에게 결과를 알려주기 위한 보완 장비를 가지고 있는 것.
하나의 작업에 최적화된 비전시스템과 응용사례 전반에 적합한 비전시스템 사이에는 유의미한 차이가 있음을 인지하는 것이 중요하다. 작업에 최적화된 센서·조명·렌즈 등에 대한 중요성을 인식해야 하는 이유이다.
위와 같은 작업이 선행되지 않으면 예기치 못한 결함 및 불량품의 발생률 등이 올라가거나 최악의 사태인 ‘오판(Fast Positives, 잘못된 제품을 양품이라고 판단하는 것)’을 야기할 수 있다.
현재 시장에서는 다양한 형태의 비전시스템이 존재한다. 이 문서의 목적에 따라 두 종류의 카메라를 살펴보고자 한다. ▲하나의 내장형(임베디드) 센서를 탑재하고 있는 것(이를 스마트카메라라고 한다)과 ▲하나 이상의 센서를 부착하고 있는 카메라(이를 멀티 카메라 비전시스템이라 한다)가 그것이다.
작업에 적합한 카메라를 결정하기 위해서는 카메라에 탑재되어 있는 센서의 개수 외에도 성능·소유비용·시스템 작동에 필요한 환경 등 여러 요소들을 살펴보아야 한다.
예를 들어, 스마트카메라는 일반적으로 다수의 카메라로 이루어진 시스템보다 혹독한 작업환경에서 잘 작동하도록 설계되어있다. 반면 다수의 카메라는 비용이 적게 들며, 상대적으로 성능이 뛰어나 복잡한 응용사례에 보다 쉽게 적용할 수 있다.
두 시스템의 종류를 구분하는 또 다른 방법은 공정의 요구사항이라는 관점에서 생각해보는 것이다.
자동차 제조업에서는 조립라인을 따라 독립적인 여러 검사지점을 마련하는 것이 바람직하다. 이 경우 스마트카메라가 좋은 선택이다. 스마트카메라는 독립적으로 작업할 수 있고, 구체적이고 독특한 작업을 수행하도록 프로그래밍하기가 쉬우며, 필요하다면 생산라인 내의 여타 검사지점에 영향을 주지 않고도 검사 내용을 수정할 수 있다. 이러한 특징으로 하나의 커다란 공정을 다수의 카메라로 ‘분산시킬(Distributed)’ 수 있다.
그런가하면 ‘집중적인(Centralized)’ 처리방식이 더 적합한 생산라인도 있다. 조립공정의 최종 검사작업에 16개 내지 32개의 센서를 필요로 하는 경우에는 다수의 카메라를 활용한 시스템이 보다 적절한 선택이다. 비용이 적게 들고, 사용자가 각각의 카메라를 연동해 상호작용하기가 보다 편하기 때문이다.
비전시스템을 선택하는 과정에서 가장 중요한 역할을 하는 것은 아마 소프트웨어가 아닐까 싶다.
소프트웨어를 선정할 때의 고려사항 중 하나는, 소프트웨어가 수행할 수 있는 기능이 응용사례·프로그래밍·실시 시간(런타임) 등에 대한 요구사항을 모두 충족해야 한다는 점이다. 만약 요구사항을 충족할 수 없는 소프트웨어를 선택했다면 시스템이 사용자의 요구사항을 충족하도록 만드는 작업에 더 많은 시간과 비용을 투자하게 될 것이다.
만약 새로운 머신비전을 도입하거나 복잡하지 않고 간단한 응용사례를 설계해야 한다면, 사용하기 쉬운(즉 프로그래밍이 필요 없는) 소프트웨어를 사용하는 것이 바람직하다. 패턴 매칭·기능 검사(Feature Finding)·1D 및 2D 바코드·OCR 등의 핵심 기능을 탑재하고 표준의 공장 프로토콜(Standard Factory Protocol)을 사용해 여타 장치와 연결이 용이한 소프트웨어를 찾는 것이 제격이다.
만약 요구사항이 복잡하고 사용자가 프로그래밍에 친숙한 경우라면 보다 유연하고 추가적인 제어 기능을 제공하는 고급 소프트웨어 패키지를 사용하는 것이 바람직하다.
어떤 경우가 되었든 사용하고자 하는 소프트웨어를 비전시스템 플랫폼에서 활용할 수 있는지를 우선적으로 확인해야 한다. 검사 요구사항이 변경되었을 때 쉽게 플랫폼을 변경할 수 있는지도 체크하자.
고려해야 할 요인들
이미지센서의 해상도
이미지센서는 수집한 빛을 전기 신호로 변환하는 역할을 한다. 이 신호는 ‘픽셀(화소)’을 배열하는 방식으로 디지털화된다. 검사를 진행하는 동안 비전시스템이 픽셀을 가공한다.
이미지센서는 스마트카메라처럼 비전시스템에 통합하는 방식 혹은, 카메라 내에 연결(혹은 부착)하는 방식을 사용할 수 있다.
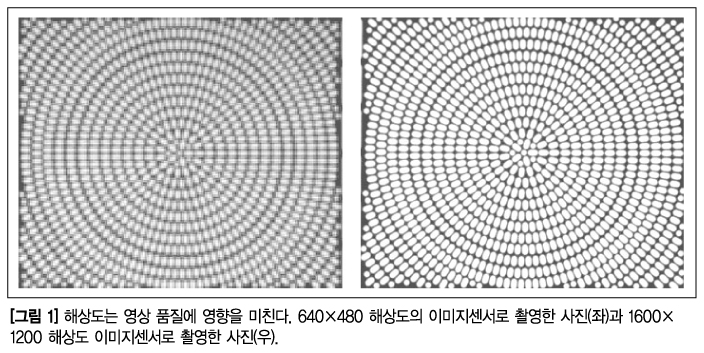
검사 작업의 해상도(정확도)를 결정짓는 요소 중 하나는 센서가 가지고 있는 물리적 픽셀의 숫자다. 표준형 VGA 센서는 640×480 물리적 픽셀을 가지고 있다(너비×높이). 각 픽셀은 약 7.4㎛2 정도의 넓이를 가지고 있다. 이를 바탕으로 ‘현실 세계’에서의 단위로 해상도를 추정할 수 있다.
비전시스템에서 사용하는 이미지센서는 보다 전문화된 제품이다. 웹캠에 사용하는 이미지센서보다 비싼 이유다.
비전시스템에 적합한 카메라의 특징은 다음과 같다. 첫째, 이미지센서는 물리적인 화소(픽셀)가 정사각형 형태를 띠는 것이 바람직하다. 측정 및 수치 계산을 보다 쉽고 정확하게 하기 위함이다. 둘째, 비전시스템이 제자리에 부품이 있다는 신호(Part In Place Signal)를 받아들여 카메라를 작동시킬 수 있어야 한다. 셋째, 카메라는 정교하고 수준 높은 노출 및 빠른 전기적 셔터를 갖춰야 한다. 생산라인을 통해 빠르게 움직이는 부품을 정지화면처럼 촬영해야 하기 때문이다.
몇몇 이미지센서는 응용사례에 따라 다양한 해상도 및 인터페이스를 선택할 수 있다. 대부분 여러 이미지센서를 활용해 다량의 부품을 검사하거나 커다란 부품의 다양한 부분을 검사하기도 한다.
렌즈 선택
이미지센서 선정이 끝났다면 렌즈를 고를 차례다. 렌즈는 검체를 통해 반사되거나 투과된 빛을 수집해 센서에 영상을 형성하는 역할을 맡는다. 적절한 렌즈는 작업자로 하여금 원하는 시계(Filed of View, FOV)만큼 볼 수 있도록 만들며, 부품과의 사이가 멀든 가깝든 원하는 작동거리에 카메라를 설치할 수 있게 해준다.
작동거리는 대략적으로는 센서 앞에서 검사 대상이 있는 곳까지의 거리로 계산할 수 있다. 보다 정확한 작동거리를 원한다면 렌즈 및 카메라 본체의 구조를 염두에 두고 계산해야 한다.
4in. 폭에 2in. 길이를 가진 검사 대상을 떠올려보자. 이 검체를 안정적으로 검사하기 위해서는 시계가 4in. 이상이 되어야 한다. 시계 안에서 검체가 움직일 가능성을 고려해야 하기 때문이다.
시계를 지정할 때에는 카메라의 영상비(Aspect Ratio) 역시 고려해야 한다(영상비는 폭과 길이의 비율로, 종횡비라고도 이야기한다. 편집자 주). 비전시스템에 사용되는 센서가 일반적인 4:3 영상비를 가진다고 가정해보자. 이 경우 앞서 예시한 4in. 폭에 2in. 길이를 가진 검사 대상은 원활하게 검사할 수 있겠지만, 4in. 폭에 3.5in. 길이를 가진 부품은 보다 넓은 시계를 가져야만 부품의 모양과 크기 그리고 상태 등을 한눈에 파악할 수 있다.
시계와 작동거리 그리고 카메라의 사양을 통해 렌즈의 초점거리를 추산할 수 있다.
초점거리는 렌즈를 지정하는 가장 일반적인 방법으로 통한다. 이론적으로는 ‘아득히 먼 곳으로부터 온From Infinity’ 평행한 광선이 렌즈 뒤쪽에 닿음으로써 영상의 초점을 맞추게 된다. 머신비전에서 사용하는 일반적인 렌즈의 초점거리는 9㎜, 12㎜, 16㎜, 25㎜, 35㎜, 55㎜ 등이 있다.
이렇게 추산한 거리가 위에 나열한 일반적인 값들과 완전히 일치하지는 않을 것이다.
이 경우 텔레다인달사는 추산한 것과 가장 흡사한 초점거리를 선택하고, 이후 작업 거리를 조절하는 방식으로 원하는 시계를 얻는 것을 추천한다.
대부분의 머신비전 공급업체는 사용자의 시계와 작동 거리가 일치하도록, 원하는 수치에 가장 가까운 렌즈를 계산할 수 있는 도구를 제공한다.
렌즈에 대한 여타 중요한 요소로는 광학적 왜곡(Optical Distortion)의 양과 종류, 그리고 렌즈가 정밀하게 초점을 맞출 수 있는 정도가 있다.
광원(조명)
인간의 눈은 다양한 광원 아래에서도 사물을 잘 분간할 수 있다. 하지만 오늘날의 머신비전 시스템은 그렇게까지 기능적이지 못하다. 검체에 적절하고 세밀하게 조명을 비추어야 검사하고자 하는 특징들을 머신비전 시스템이 분명하게 ‘볼’ 수 있다.
이상적인 조명은 조정이 용이하고 세기가 일정해야 한다. 또한 광원이 아닌 검체의 변화로 인해 조명의 세기가 바뀌어야 한다. 즉, 광원의 조명 세기는 언제나 일정해야 한다. 비전시스템은 조명의 변화로 검체의 이상을 감지하기 때문이다.
일부 비전 알고리즘 중에서는 광원이 어느 정도 바뀌어도 검사에 지장을 받지 않는 종류도 있다. 하지만 알고리즘의 힘을 빌리지 않더라도 설계에 주의를 기울이면 그 어떤 불확실성도 없앨 수 있다.
광원을 선택할 때 염두에 두어야 할 목표는 검사하고자 하는 요소를 ‘증폭’시키고 불필요한 요소를 ‘약화’시키는 것이다.
적절한 조명은 빠르고 정확한 검사를 보장하는 반면, 부적절한 조명은 검사 실패의 주요 원인으로 작용한다. 조명의 선택이 중요한 이유다.
조명을 선택할 때에는 환경광(Ambient Light, 태양광이나 형광등처럼 일상 환경에서 볼 수 있는 조명을 말한다. 편집자 주)을 피하는 것이 일반적이다. 환경광은 시간이 지남에 따라 변화될 여지가 있기 때문이다. 공장의 조명은 깜빡이거나, 가열 등으로 인해 고장이 나거나, 어두워지거나, 흐려지거나, 모종의 이유로 차단될 수도 있다. 유사한 예로, 만약 검사 지점 근처에 창문이 있다면 외부에서 들어오는 빛이 시스템 안정성에 부정적인 영향을 미칠 수 있다. 적절한 조명을 선택하는 과정은 경험과 지식을 모두 필요로 한다.
기타 고려사항
본격적인 검사에 들어가기 전에, 검사를 수행하는 비전시스템에 부품(Part)을 인식시키는 방식을 고려해야 한다. 비전시스템에 부품의 예시를 일관적으로 제공하지 않으면 사용자가 원하는 결과를 얻기 어려워진다. 따라서 검사하고자 하는 검체의 표면 정보를 센서에 인식시키는 것이 중요하다.
그 다음으로는 움직이는 검체를 검사할지, 멈춰있는 검체를 검사할지를 결정해야 한다. 검체가 움직이는 경우, ‘굳은(Frozen)’ 것처럼 촬영해야 할 필요가 있다. 조명을 아주 잠시 동안만 조사하거나(이를 스트로빙이라 한다), 센서의 고속 전자 셔터 기능을 사용하는 방법이 효과적이다(표준 산업용 비전 센서는 대부분 고속 전자 셔터 기능을 탑재하고 있다).
움직이는 검체를 촬영하기 위해서는 센서에 트리거(신호)를 제공해야 한다. 언제 검체를 촬영해야 하는지 명확히 하기 위해서다. 트리거는 포토아이 센서를 통해 만드는 것이 일반적이다. 포토아이 센서는 검체가 검사 영역으로 이동하면 검체의 앞부분(Front Edge)을 감지한다.
검체가 정지해 있는 경우에는 해결책 역시 달라진다. 예를 들어 특정 위치에 대한 색인이 있거나 로봇 등을 통해 센서 바로 앞에 검체를 배치하는 경우에는 센서가 PLC 혹은 로봇으부터 트리거를 받아올 수 있다. PLC나 로봇이 이미지센서에 촬영 명령을 내리는 셈이다.
매우 빠른 속도로 부품을 검사하는 경우에는 부품의 위치 설정을 검사에 최적화해야 한다. 처리 시간을 줄이기 위해서다. 이러한 시스템을 설계할 때는 처리 대역폭(Processing Bandwidth)을 남김없이 활용해야 함을 유념하라. 따라서 고속 검사에 사용하는 비전시스템을 고려하고 있다면 당신이 필요로 하는 검사 요소들이 필수적인 것인지, 단순히 있으면 좋은 것인지를 결정해야 한다.
충분한 지식과 지원을 가진 공급업체와 함께 작업하면, 비전시스템 솔루션을 구축하는 비용은 품질과 제품 효율 향상 그리고 폐기물 감소 등을 통해 몇 배 이상의 이익으로 돌아온다.