유압 시스템은 큰 힘을 낼 수 있어 널리 활용되고 있다. 하지만 정밀한 제어가 동반되지 않는다면, 커다란 힘은 치명적 손상이라는 위험을 일으킬 수 있다. 모션 시스템에서의 힘은 곧 비용으로, 불필요하게 과도한 힘이 발생하지 않도록 해야 비용의 낭비를 막을 수 있다. 유압 시스템의 정밀한 제어를 가능케 하는 전자-유압식 모션 컨트롤러Electro-Hydraulic Motion Controller에 대해 알아본다.
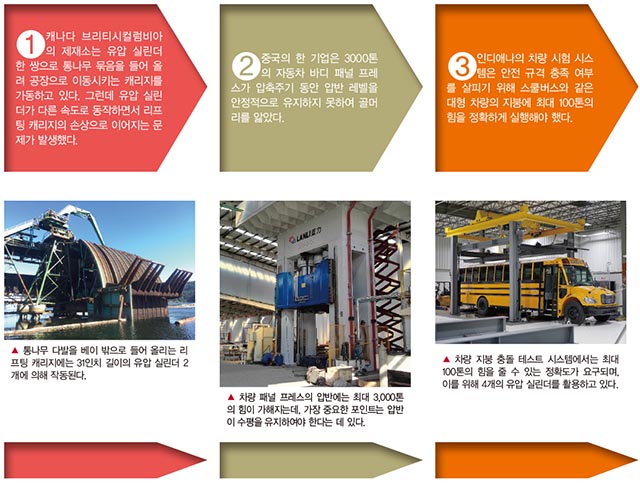
상기한 세 가지 사례에서 문제 해결을 위해 설계 엔지니어가 취해야 할 조치는 무엇일까?
바로 여러 유압 축의 정확한 동기화이다. 다중 축 동기화Multi-axis Synchronization는 기기가 손상되거나 기기의 출력이 손상될 수 있는 위험을 제거하며, 구형 유압 기술과 비교할 때 출력의 생산성과 품질을 향상시키는 동시에 유지보수 문제까지 감소시킬 수 있게 한다.
제재소의 경우, 로그 리프팅 작업의 신뢰성을 높이기 위해 팔을 작동시키는 모션 제어 시스템을 업그레이드했으며, 차량의 바디 프레스 제조업체는 압반의 네 모서리에 완충 실린더를 추가해 압축 행정 중 수평 상태가 유지되도록 함으로써 잠재적인 압반 왜곡 문제를 해결했다.
그리고 차량 지붕 충돌 테스트 기업은 4개의 유압 실린더가 함께 작동하여 강력하게 제어된 힘을 가하는 테스트 장비를 설치했다. 즉 폐쇄 루프 제어를 지원하면서 다중 축을 제어하는 새로운 모션 컨트롤러를 통하여 당면과제를 해소한 것이다.
올바른 선택을 위한 조건
정밀한 폐쇄 루프 제어를 위해서는 먼저 정확한 피드백이 요구된다. 상기한 세 가지 애플리케이션에서도 실린더의 위치 정보는 선형 자기 변형 변위 센서LMDT로 수집됐다. LMDT는 일반적으로 실린더에 장착되어 정밀한 위치 측정을 제공할 뿐 아니라 시동 시 조정 또는 원점 복귀 단계가 필요 없는 이점을 지닌다.
압력 또는 힘 정보는 피스톤 로드의 끝단에 장착된 로드 셀이나 피스톤 양쪽의 실린더에 설치된 압력 변환기Pressure Transducer에 의해 제공받는다. 압력 변환기가 센서들 사이의 압력차를 계산함으로써 실린더에 의해 적용되는 힘을 알 수 있게 되는 것이다.

모션 컨트롤 시스템을 설계할 때에는 애플리케이션의 위치 또는 압력 요구 사항에 필요한 것보다 더 많은 해상도가 필요하다. 연속 또는 시작/정지 동작과 관련된 비교적 단순한 응용 프로그램에서는 정확할 수 있지만 동적 조건과 관련된 경우가 대표적이다. 예컨대 정확한 속도 또는 가속 측정을 제어 알고리즘에 포함시켜야하는 애플리케이션에서는 아주 세밀한 분해능이 요구된다.
또한 슬레이브 축의 움직임이 마스터 축의 움직임과 비례하는 동기화나 기어링 애플리케이션에서 마스터 축 피드백은 가능한 한 많은 분해능과 정확도를 가져야 부드러운 움직임이 가능하며, 매우 느리게 이동하는 애플리케이션의 경우에도 제어 루프가 실행될 때마다 위치 변화를 감지하거나 힘을 가할 수 있는 고해상도 피드백이 요구된다.
그런데 모션 컨트롤러 선택 및 프로그래밍에 주의를 기울여도 유압 시스템 구성 요소의 잘못된 크기, 혹은 물리적 위치로 인해 시스템 성능이 제한될 수 있다. 특히 중간에서 중중량으로 움직이는 액추에이터의 경우에는 가감속과 속도는 오일의 흐름이 아닌 사용 가능한 힘에 의해 제한되며, 실린더 직경이 너무 작으면 액츄에이터가 원하는 속도나 사이클 시간을 얻을 수 없다.
실린더의 정확한 크기가 확인되면 밸브의 크기(유량 등급)는 보다 쉽게 선택할 수 있다. 서보-퀄리티 밸브는 유압 유체의 무한 가변 흐름을 제공하고, 일반적으로 다른 비례 밸브보다 더 빠르고 선형적인 응답이 가능하기 때문에 언제나 권장된다. 또 고성능의 위치/압력 제어 시스템을 위해서는 빠른 응답의 선형 밸브도 제안된다. 반면 전통적인 투 포지션 뱅-뱅 밸브는 폐회로 제어에 적합하지 않다. 유압 쇼크와 진동을 유발하여 기계 유지 보수 문제를 일으키기 때문이다.
물론 설계자의 요구에 맞춰 이상적으로 완벽하게 작동하는 밸브는 아직까지 없다. 따라서 액추에이터, 부하의 밸브 응답과 질량 및 스프링 효과를 보완하기 위해서는 우수한 모션 컨트롤러가 필수적이다.
다중 축 동기화를 위한 기술
다중 축 모션에서 모션 컨트롤러 프로그래밍의 핵심은 동기화할 축의 제어 루프간 연결 및 관계 설정이다. 모션 컨트롤러의 프로그래밍 기능을 활용하여 다중 축 동기화를 보다 수월하게 진행할 수 있다.
§ 가상 기어링Virtual Gearing : 차량 지붕 충돌 테스트 애플리케이션의 경우, 무거운 게이지 압력 플레이트의 네 구석에 4개의 별도 모션 축으로 제어되는 유압 액추에이터(실린더)를 4개를 사용했다. 압축 작업 중에 압력 플레이트의 수평을 유지하기 위해서는 이들 4축 모두가 정확하게 동기화되어야 한다.
4축의 정확한 동기화를 이뤄내는 모션 프로그래밍 기법이 바로 가상 기어링이다. 가상 기어링은 가압판의 위치와 누적 힘이 적용되도록 설정한 가상의 마스터 축을 따라 4개의 슬레이브 축이 움직이게 함으로써 정확한 동기화를 이뤄내는 모션 컨트롤러의 특수 기능이다. 이때 모션 컨트롤러는 실린더에 부착된 LMDT 값을 사용하여 각 모서리 실린더의 위치를 추적하고, 각 실린더 로드 끝단에 장착된 로드셀을 사용하여 압축력을 제어한다.
§ 계단식 제어 루프Cascaded-Loop : 앞서 자동차 패널 프레스 애플리케이션에서 모션 컨트롤러는 계단식 루프 아키텍처를 사용하여 제어 기능을 수행한다. 내부 제어 루프를 압반의 수평을 맞추는 역할하게 하면서 외부 루프가 압반의 움직임을 따라 쿠션(평탄화) 실린더의 목표 위치를 동시에 조정하도록 하는 것이다.
이때 바깥 쪽 제어 루프는 완충 실린더에 의해 가해지는 힘을 모니터링하여 PLC가 제공한 한계 이하로 유지되는지 확인한다. 누적 힘이 너무 높을 경우, 모션 컨트롤러는 힘을 설정된 한계 이하로 유지하기 위해 압반의 위치를 변경한다.
아래의 그림은 계단식 제어 아키텍처를 표현한 것으로, 압반의 수평을 맞추기 위해 모션 컨트롤러가 가상 마스터 축 위치로 취급하는 쿠션 실린더의 평균 위치를 계산하고, 이 평균과 일치하도록 각 실린더 위치를 이동시킨다. 각 쿠션 실린더에 의해 적용되는 힘을 알기 위해서 모션 컨트롤러는 피스톤의 각 측면에 작용하는 유압 오일의 압력 차이를 계산한다.

§ 커스텀 피드백Custom Feedback : 자동차 프레스 애플리케이션에서는 커스텀 피드백이라는 모션 컨트롤러 기능이 활용됐다. 커스텀 피드백은 모션 컨트롤러가 수학적 또는 논리적 사전 시뮬레이션을 수행하는 기술로, 모션 컨트롤러가 위치 및 압력 변환기의 원시 피드백을 바탕으로 수학 계산을 진행한다. 결과 값 이전의 미가공 피드백 센서 데이터의 처리는 제어 루프 알고리즘에 제공되며, 피드백이 제어 루프에 의해 사용되기 전 원시 데이터가 계산됨으로써 제어 알고리즘과 구현 및 조정이 더 간단하게 된다.
§ 위치-압력/힘 제어Position-Pressure/Force Control : 자동차 패널 프레스와 차량 루프 크러시 테스트 애플리케이션 모두에서 모션 컨트롤러는 힘과 위치를 기반으로 제어하고 두 컨트롤러 사이를 부드럽게 전환할 수 있는 기능을 제공한다. 패널 프레스 시스템에서 외측 루프는 위치 제어에서 시작하여 주 실린더에 의해 가해지는 총 힘을 모니터링하며, 내측 루프가 위치를 제어하는 동안 힘이 일정 값에 도달하면 힘 제어로 전환한다. 차량 지붕 테스트 시스템은 위치 제어에서 시작하여 명령 시 제어된 힘을 가한다.
애플리케이션 개발 및 저장

모션 프로그래밍은 일반적으로 모션 컨트롤러 공급 업체가 제공하는 개발 소프트웨어를 사용하여 수행된다. 몇몇 모션 컨트롤러는 범용 컴퓨터에서 사용되는 것과 비슷하게 명령어로 프로그래밍되지만, 그래픽 프로그래밍 도구와 드롭 다운 메뉴를 사용하여 모션 알고리즘을 보다 편리하게 설정할 수 있도록 하는 모션 컨트롤러도 있다.
프로그래밍 후에는 모션 시스템의 세부 조정이 필요하다. 예를 들어 차량 지붕 충돌 테스트에서는 설치 후 최초 동작 시 시험 장비의 흔들림이 발생했다. 이에 시스템 설계자는 자동화된 튜닝 툴을 사용하여 미세 조정을 수행했다. 모션 컨트롤러 벤더가 그래픽 모션 플로팅 도구를 제공할 경우, 이러한 미세 조정 프로세스는 한층 쉽게 이뤄질 수 있다.
